Active Event-based Stereo Vision
{kind=link}
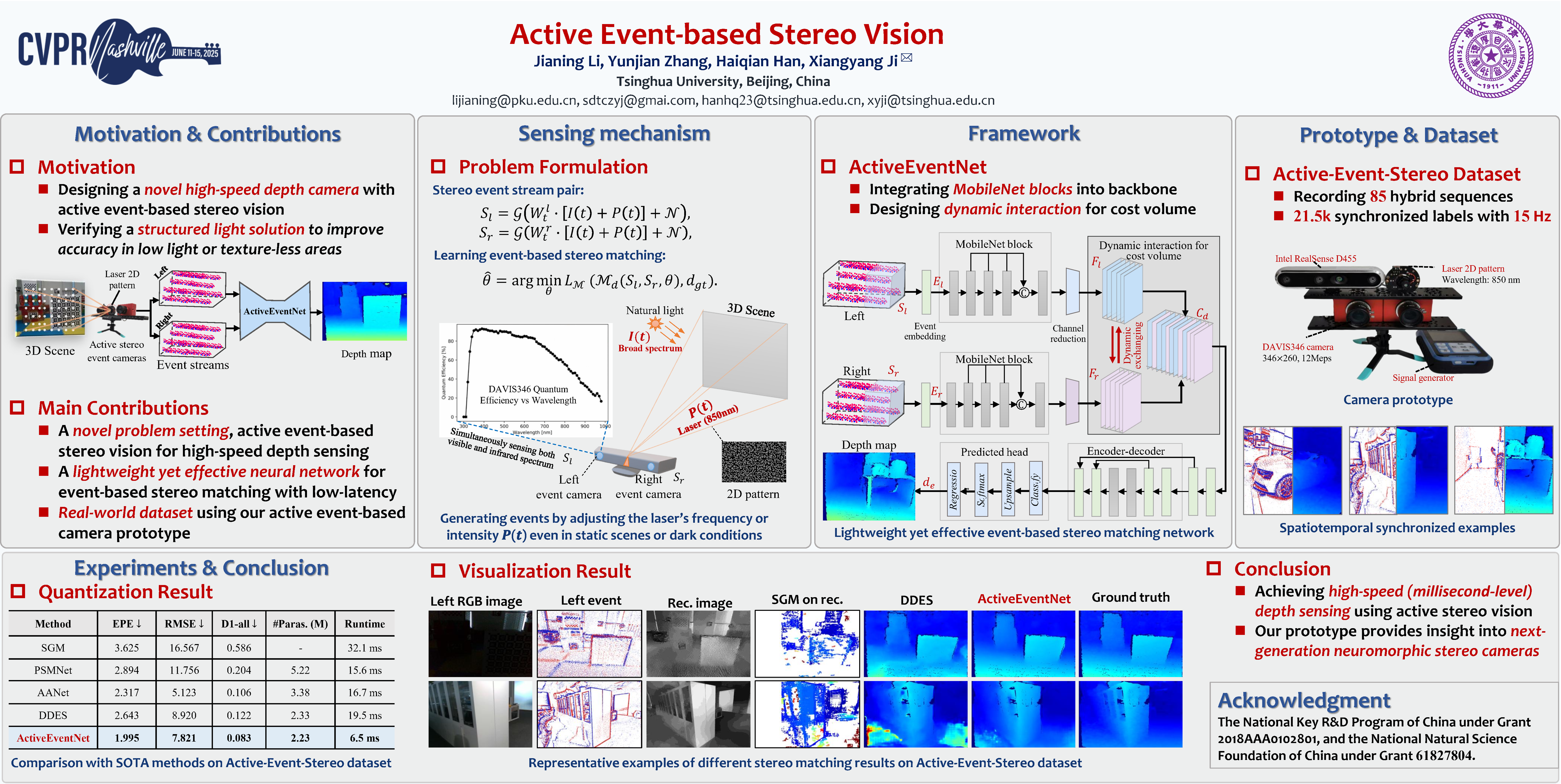
Abstract
Conventional frame-based imaging for active stereo systems has encountered major challenges in fast-motion scenarios. However, how to design a novel paradigm for high-speed depth sensing still remains an open issue. In this paper, we propose a novel problem setting, namely active stereo event-based vision, which first integrates binocular event cameras and an infrared projector for high-speed depth sensing. Technically, we first build a stereo camera prototype system and present a real-world dataset with over 21.5k spatiotemporal synchronized labels at 15 Hz, while also creating a realistic synthetic dataset with stereo event streams and 23.8k synchronized labels at 20 Hz. Then, we propose ActiveEventNet, a lightweight yet effective active event-based stereo matching neural network that learns to generate high-quality dense disparity maps from stereo event streams with low latency. Experiments demonstrate that our ActiveEventNet outperforms state-of-the-art methods meanwhile significantly reducing computational complexity. Our solution offers superior depth sensing compared to conventional stereo cameras in high-speed scenarios, while also achieving the inference speed of up to 150 FPS with our prototype. We believe that this novel paradigm will provide new insights into future depth sensing systems. Our dataset descriptions and open-source code will be available in the supplemental material.