Implicit Correspondence Learning for Image-to-Point Cloud Registration
 Highlight
Highlight
{kind=link}
Abstract
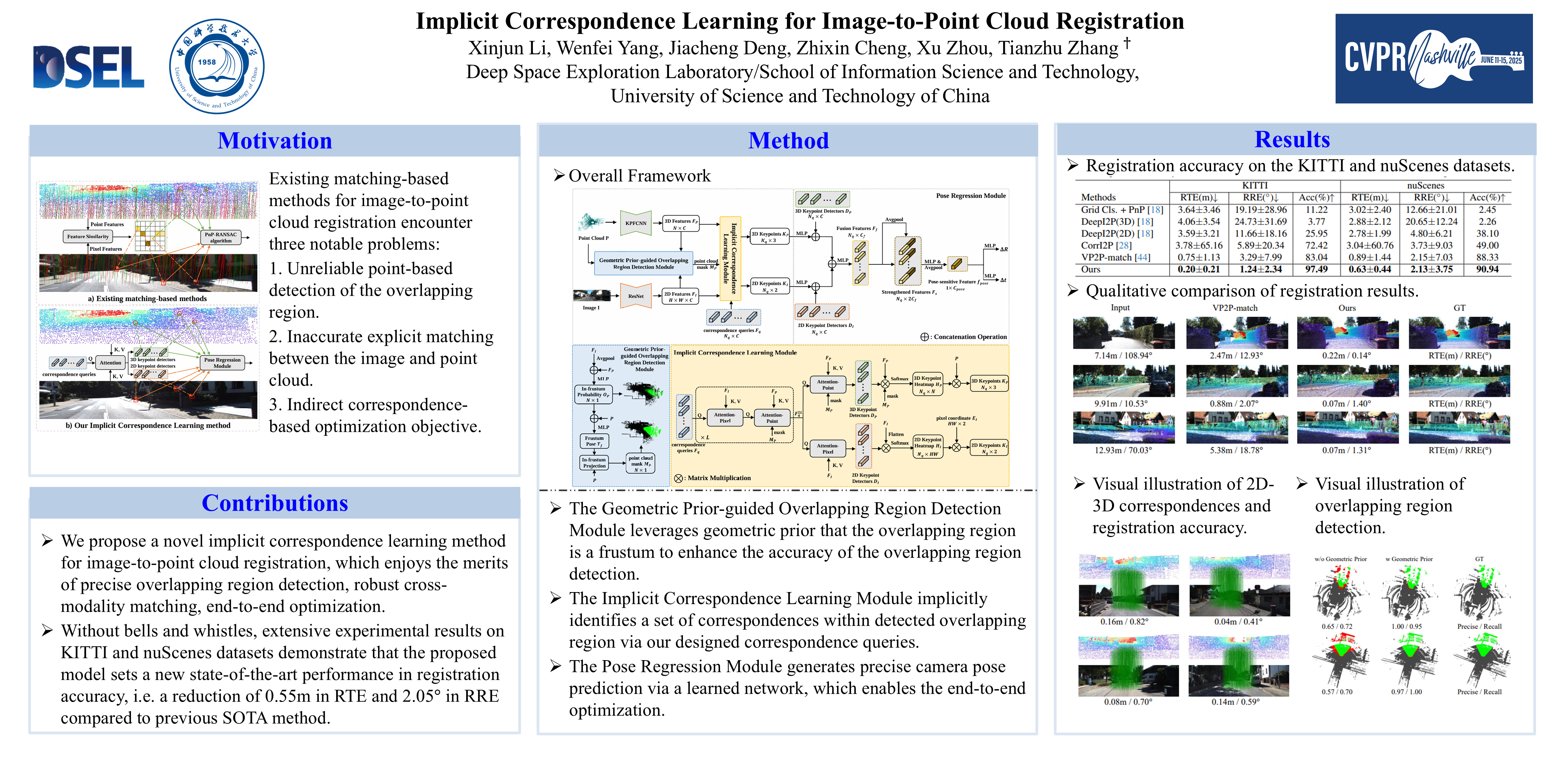
Image-to-point cloud registration aims to estimate the camera pose of a given image within a 3D scene point cloud. In this area, matching-based methods have achieved leading performance by first detecting the overlapping region, then matching point and pixel features learned by neural networks and finally using the PnP-RANSAC algorithm to estimate camera pose. However, achieving accurate image-to-point cloud registration remains challenging because the overlapping region detection is unreliable merely relying on point-wise classification, direct alignment of cross-modal data is difficult and indirect optimization objective leads to unstable registration results. To address these challenges, we propose a novel implicit correspondence learning method, including a Geometric Prior-guided overlapping region Detection Module (GPDM), an Implicit Correspondence Learning Module (ICLM), and a Pose Regression Module (PRM). The proposed method enjoys several merits. First, the proposed GPDM can precisely detect the overlapping region. Second, the ICLM can generate robust cross-modality correspondences. Third, the PRM can enable end-to-end optimization. Extensive experimental results on KITTI and nuScenes datasets demonstrate that the proposed model sets a new state-of-the-art performance in registration accuracy.