GeoDepth: From Point-to-Depth to Plane-to-Depth Modeling for Self-Supervised Monocular Depth Estimation
{kind=link}
Abstract
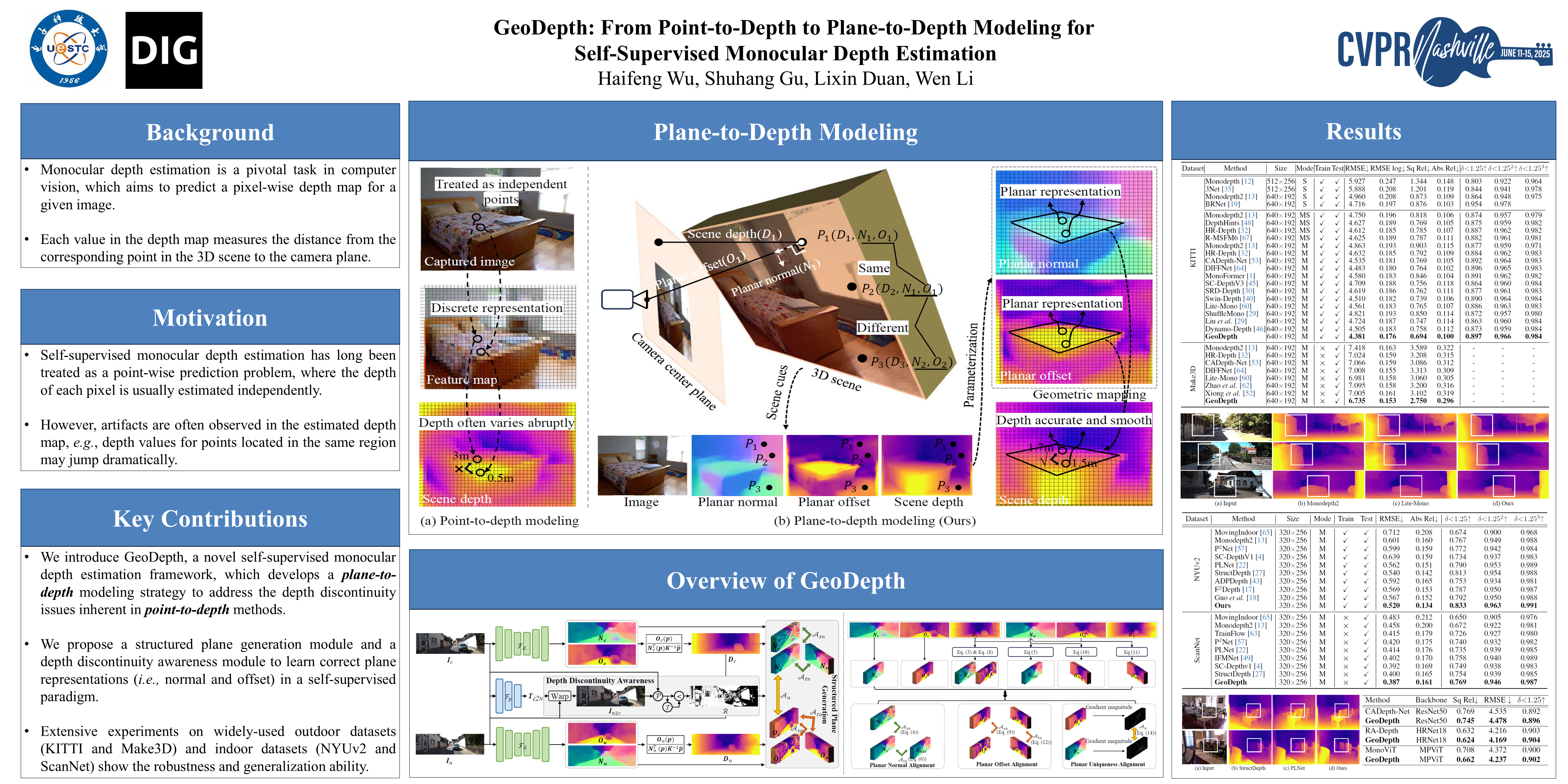
Self-supervised monocular depth estimation has long been treated as a point-wise prediction problem, where the depth of each pixel is usually estimated independently. However, artifacts are often observed in the estimated depth map, e.g., depth values for points located in the same region may jump dramatically. To address this issue, we propose a novel self-supervised monocular depth estimation framework called GeoDepth, where we explore the intrinsic geometric representation in 3D scene for producing accurate and continuous depth map. In particularity, we model the complex 3D scene as a collection of planes with varying sizes, where each plane is characterized by a unique set of parameters, namely planar normal (indicating plane orientation) and planar offset (defining the perpendicular distance from the camera center to the plane). Under this modeling, points in a same plane are enforced to share a unique representation and their depth variations related only to pixel coordinates, thus this geometric relationship can be exploited to regularize the depth variations of these points. To this end, we design a structured plane generation module that introduce temporal-spatial geometric cues and the plane uniqueness principle to recover the correct scene plane representation. In addition, we develop a depth discontinuity module to dynamically identify depth discontinuity regions and subsequently optimize them. Our experiments on the KITTI and NYUv2 datasets demonstrate that GeoDepth achieves state-of-the-art performance, with additional tests on Make3D and ScanNet validating its generalization capabilities.