Think Small, Act Big: Primitive Prompt Learning for Lifelong Robot Manipulation
{kind=link}
Abstract
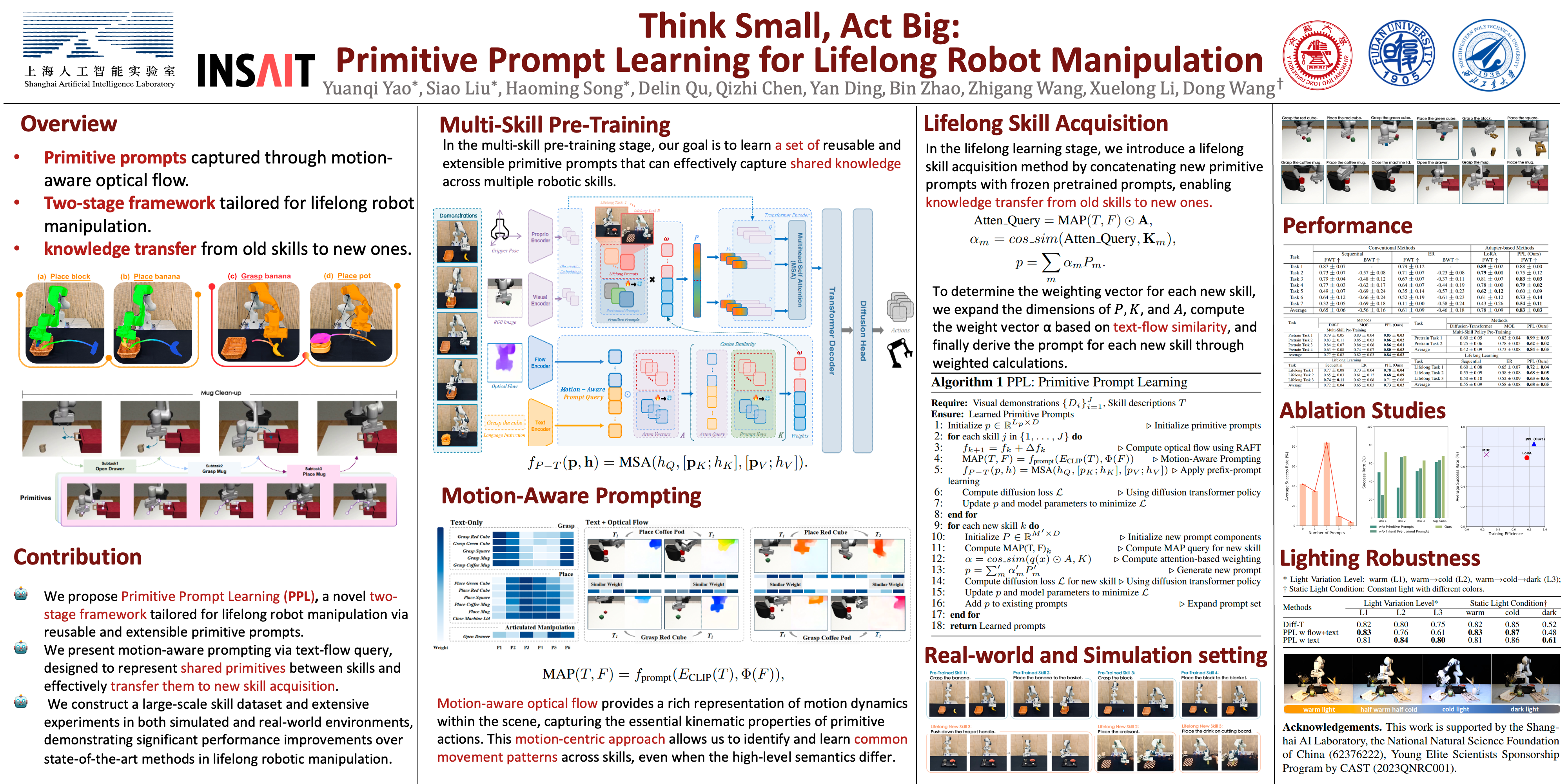
Learning a generalist robot that can effectively leverage prior knowledge for continuous skill acquisition remains significantly challenging. Despite the success of experience replay and parameter-efficient methods in maintaining knowledge across skills, naively applying these methods causes a failure to leverage the shared primitives between skills. To tackle these issues, we propose Primitive Prompt Learning (PPL), to achieve lifelong robot manipulation via reusable and extensible primitives. Within our two stage learning scheme, we first learn a set of primitive prompts to model primitives through multi-skills pre-training stage, where motion-aware prompts are learned to capture semantic and motion shared primitives across different skills. Secondly, when acquiring new skills in lifelong span, new prompts are concatenated and optimized with frozen pretrained prompts, boosting the learning via knowledge transfer from old skills to new ones. For evaluation, we construct a large-scale skill dataset and conduct extensive experiments in both simulation and real-world tasks, demonstrating PPL's superior performance over state-of-the-art methods. Code and dataset will be released upon acceptance.