EgoLM: Multi-Modal Language Model of Egocentric Motions
{kind=link}
Abstract
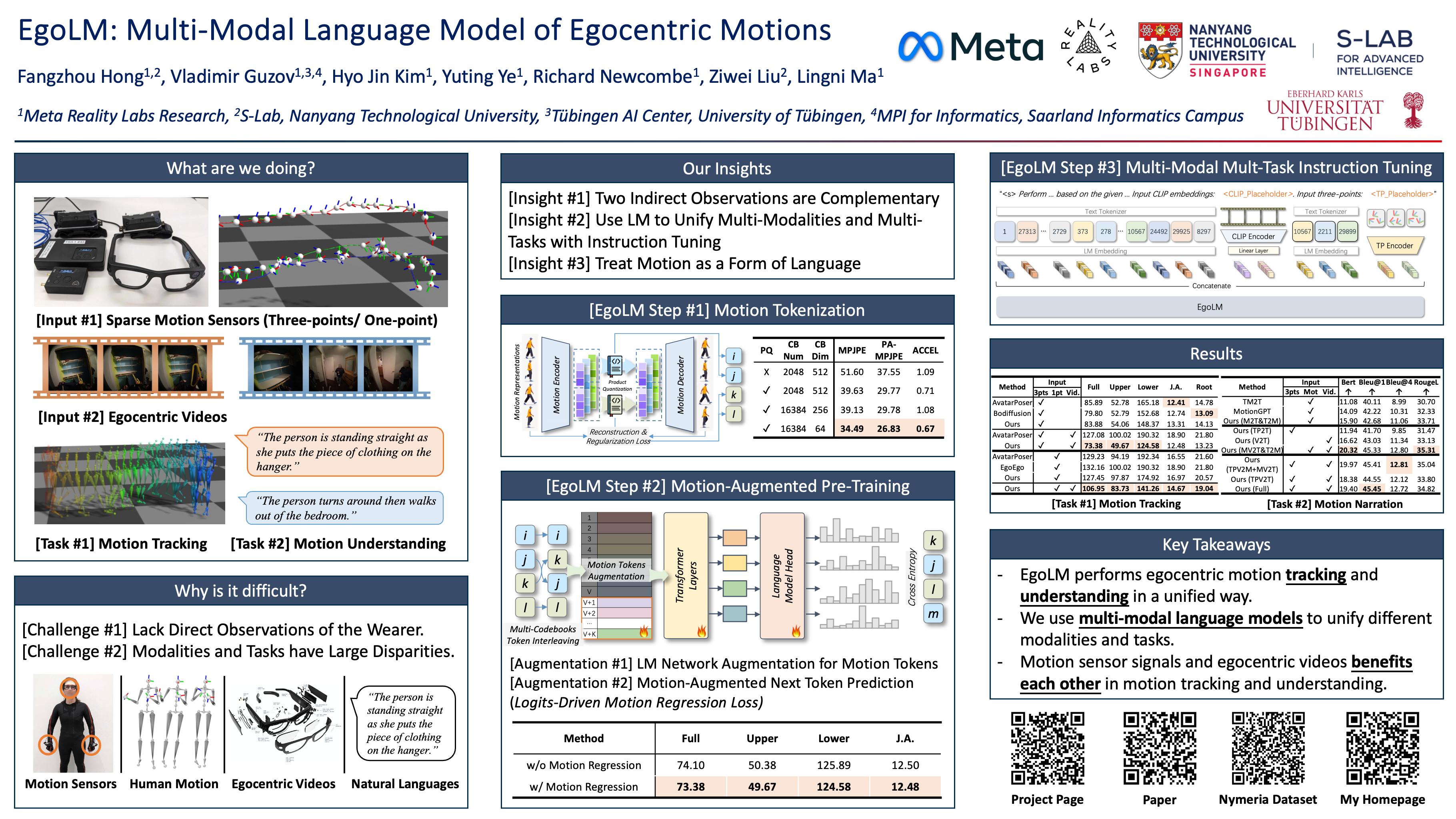
As wearable devices become more prevalent, understanding the user's motion is crucial for improving contextual AI systems. We introduce EgoLM, a versatile framework designed for egocentric motion understanding using multi-modal data. EgoLM integrates the rich contextual information from egocentric videos and motion sensors afforded by wearable devices. It also combines dense supervision signals from motion and language, leveraging the vast knowledge encoded in pre-trained large language models (LLMs). EgoLM models the joint distribution of egocentric motions and natural language using LLMs, conditioned on observations from egocentric videos and motion sensors. It unifies a range of motion understanding tasks, including motion narration from video or motion data, as well as motion generation from text or sparse sensor data. Unique to wearable devices, it also enables a novel task to generate text descriptions from sparse sensors. Through extensive experiments, we validate the effectiveness of EgoLM in addressing the challenges of under-constrained egocentric motion learning, and demonstrate its capability as a generalist model through a variety of applications.