Shape Abstraction via Marching Differentiable Support Functions
 Highlight
Highlight
{kind=link}
Abstract
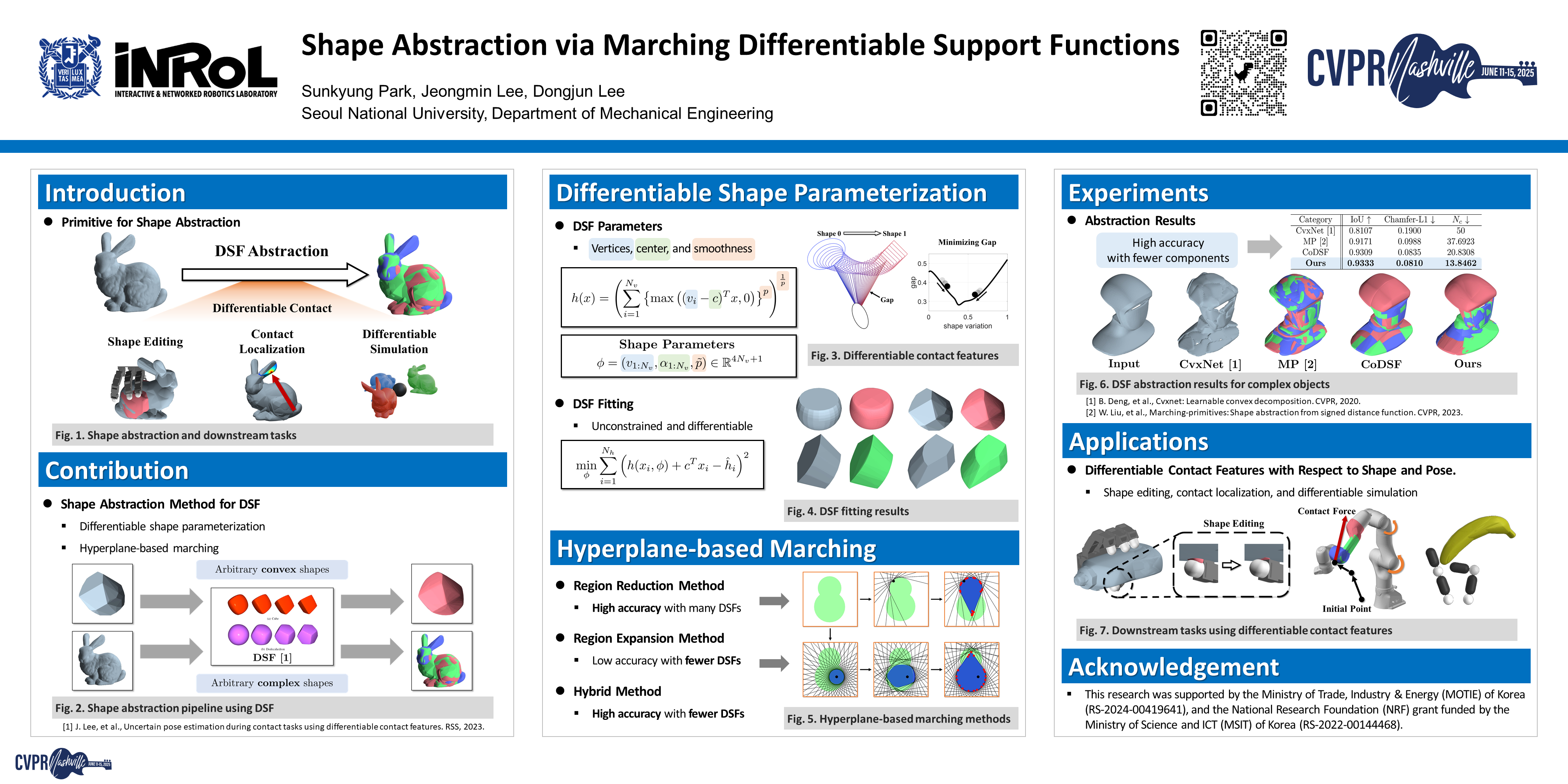
Shape abstraction, simplifying shape representation into a set of primitives, is a fundamental topic in computer vision. The choice of primitives shapes the structure of world understanding, yet achieving both high abstraction accuracy and versatility remains challenging. In this paper, we introduce a novel framework for shape abstraction utilizing a differentiable support function (DSF), which offers unique advantages in representing a wide range of convex shapes with fewer parameters, providing smooth surface approximation and enabling differentiable contact features (gap, point, normal) essential for downstream applications involving contact-related problems. To tackle the associated optimization and combinatorial challenges, we introduce two techniques: differentiable shape parameterization and hyperplane-based marching to enhance accuracy and reduce DSF requirements. We validate our method through experiments demonstrating superior accuracy and efficiency, and showcase its applicability in tasks requiring differentiable contact information.