Convex Relaxation for Robust Vanishing Point Estimation in Manhattan World
{kind=link}
Abstract
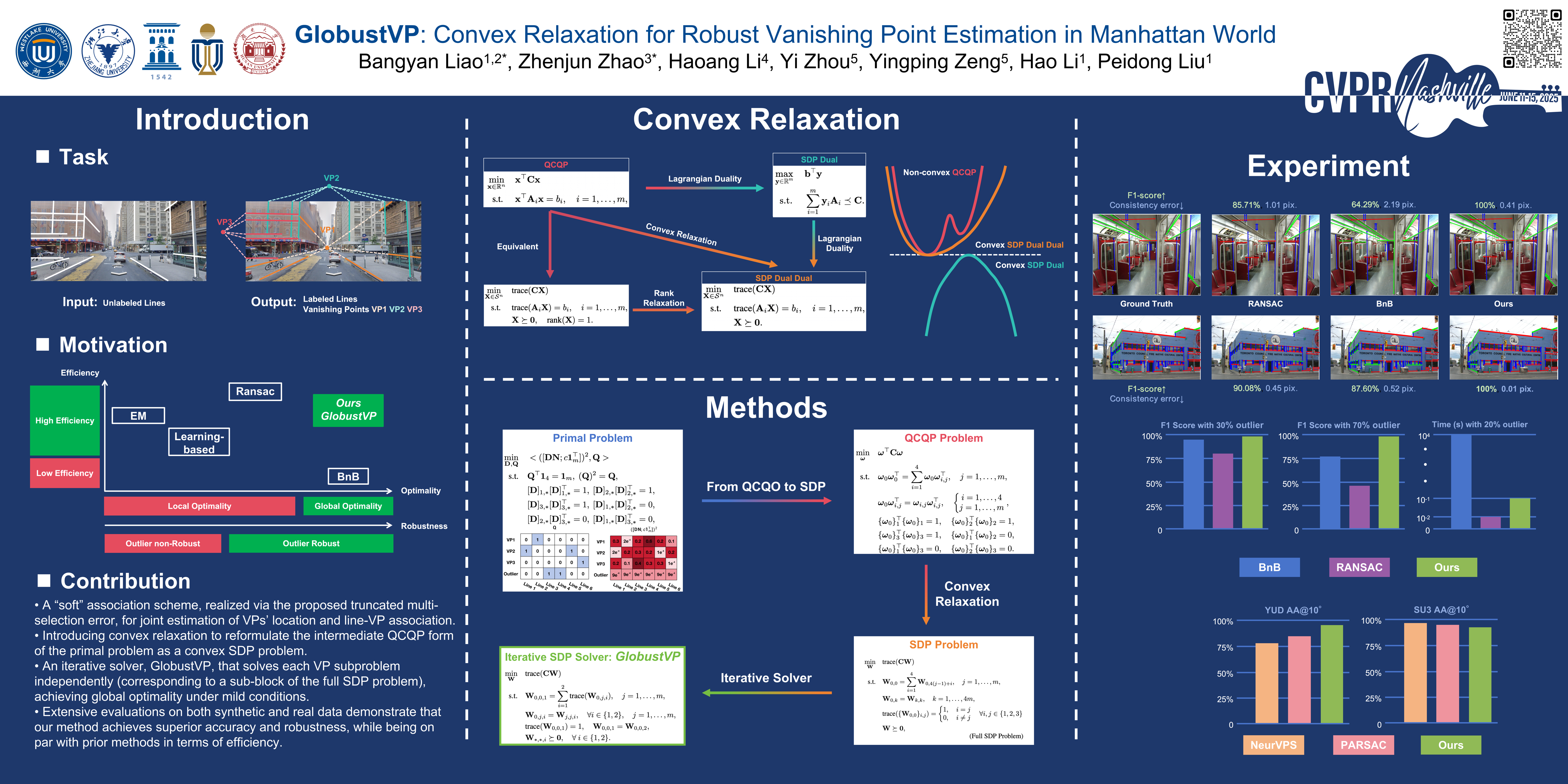
Determining the vanishing points (VPs) in a Manhattan world, as a fundamental task in many 3D vision applications, consists of jointly inferring the line-VP association and locating each VP. Existing methods are, however, either sub-optimal solvers or pursuing global optimality at a significant cost of computing time. In contrast to prior works, we introduce convex relaxation techniques to solve this task for the first time. Specifically, we employ a “soft” association scheme, realized via a truncated multi-selection error, that allows for joint estimation of VPs’ locations and line-VP associations. This approach leads to a primal problem that can be reformulated into a quadratically constrained quadratic programming (QCQP) problem, which is then relaxed into a convex semidefinite programming (SDP) problem. To solve this SDP problem efficiently, we present a globally optimal outlier-robust iterative solver (called GlobustVP), which independently searches for one VP and its associated lines in each iteration, treating other lines as outliers. After each independent update of all VPs, the mutual orthogonality between the three VPs in a Manhattan world is reinforced via local refinement. Extensive experiments on both synthetic and real-world data demonstrate that GlobustVP achieves a favorable balance between efficiency, robustness, and global optimality compared to previous works. We will release our code for further study.