VoxelSplat: Dynamic Gaussian Splatting as an Effective Loss for Occupancy and Flow Prediction
{kind=link}
Abstract
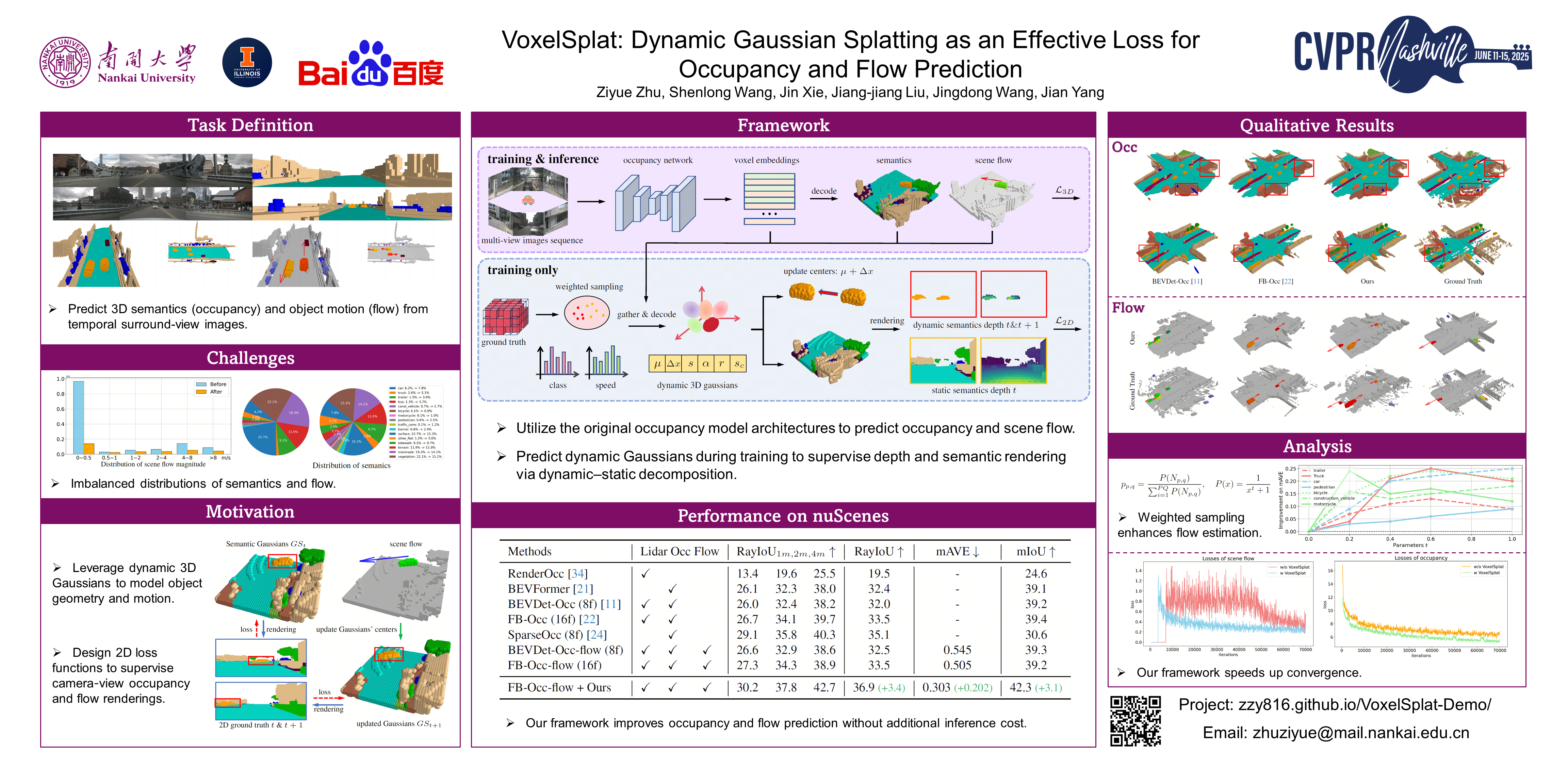
Recent advancements in camera-based occupancy prediction have focused on the simultaneous prediction of 3D semantics and scene flow, a task that presents significant challenges due to specific difficulties, e.g., occlusions and unbalanced dynamic environments. In this paper, we analyze these challenges and their underlying causes. To address them, we propose a novel regularization framework called VoxelSplat. This framework leverages recent developments in 3D Gaussian Splatting to enhance model performance in two key ways: (i)Enhanced Semantics Supervision through 2D Projection: During training, our method decodes sparse semantic 3D Gaussians from 3D representations and projects them onto the 2D camera view. This provides additional supervision signals in the camera-visible space, allowing 2D labels to improve the learning of 3D semantics. (ii) Scene Flow Learning: Our framework uses the predicted scene flow to model the motion of Gaussians, and is thus able to learn the scene flow of moving objects in a self-supervised manner using the labels of adjacent frames. Our method can be seamlessly integrated into various existing occupancy models, enhancingperformance without increasing inference time. Extensive experiments on benchmark datasets demonstrate the effectiveness of VoxelSplat in improving the accuracy of both semantic occupancy and scene flow estimation.