Gaussian Splatting Feature Fields for (Privacy-Preserving) Visual Localization
{kind=link}
Abstract
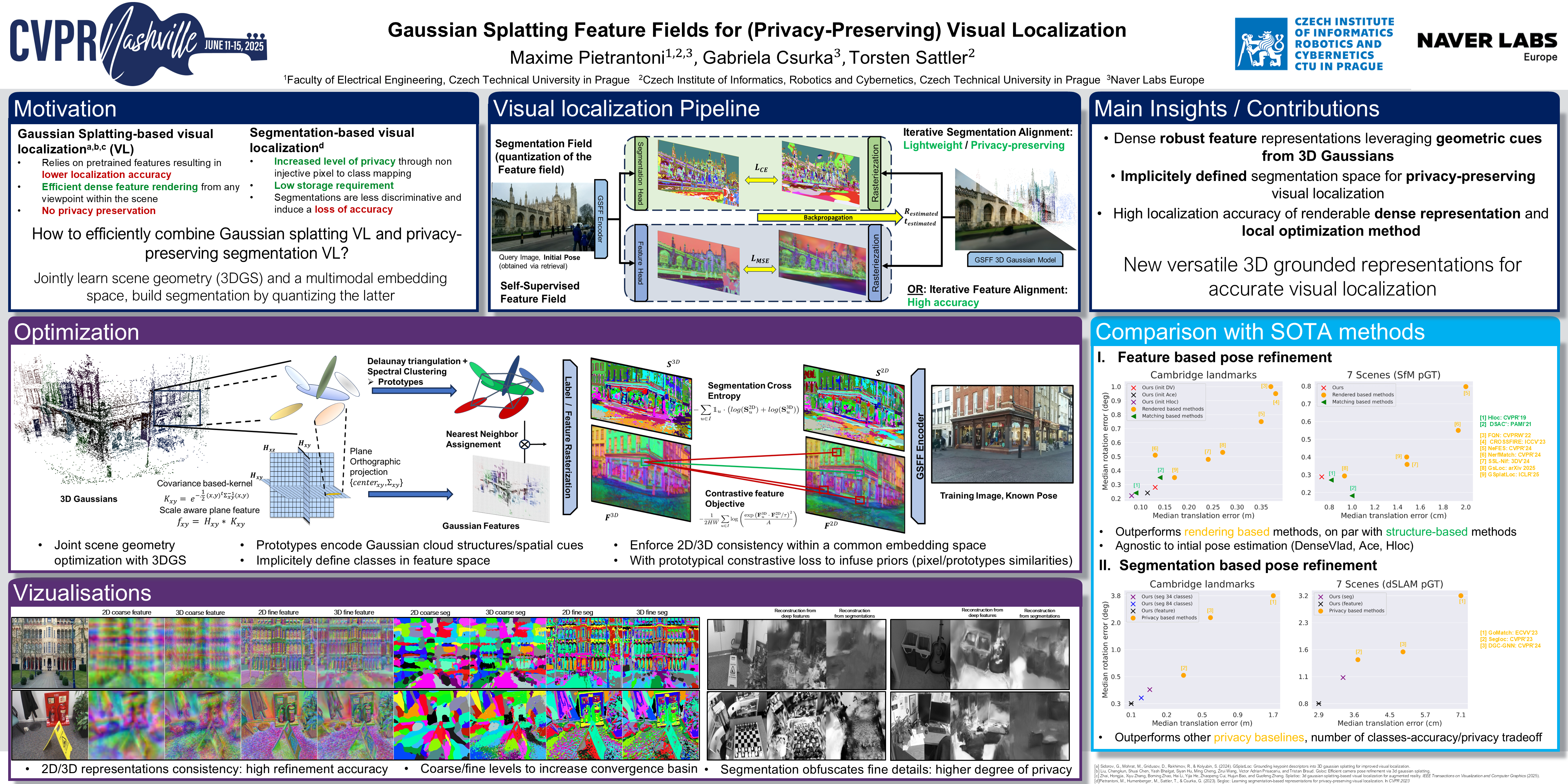
Visual localization is the task of estimating a camera pose in a known environment. In this paper, we utilize 3D Gaussian Splatting (3DGS)-based representations for accurate and privacy-preserving visual localization. We propose Gaussian Splatting Feature Fields (GSFFs), a scene representation for visual localization that combines an explicit geometry model (3DGS) with an implicit feature field. We leverage the dense geometric information and differentiable rasterization algorithm from 3DGS to learn robust feature representations grounded in 3D. In particular, we align a 3D scale-aware feature field and a 2D feature encoder in a common embedding space through a contrastive framework. Using a 3D structure-informed clustering procedure, we further regularize the representation learning and seamlessly convert the features to segmentations, which can be used for privacy-preserving visual localization. Localization is solved through pose refinement by aligning feature maps or segmentations from a query image and feature maps or segmentations rendered from the GSFFs scene representation. The resulting privacy- and non-privacy-preserving localization pipelines are evaluated on multiple real world datasets, and outperform state-of-the-art baselines.