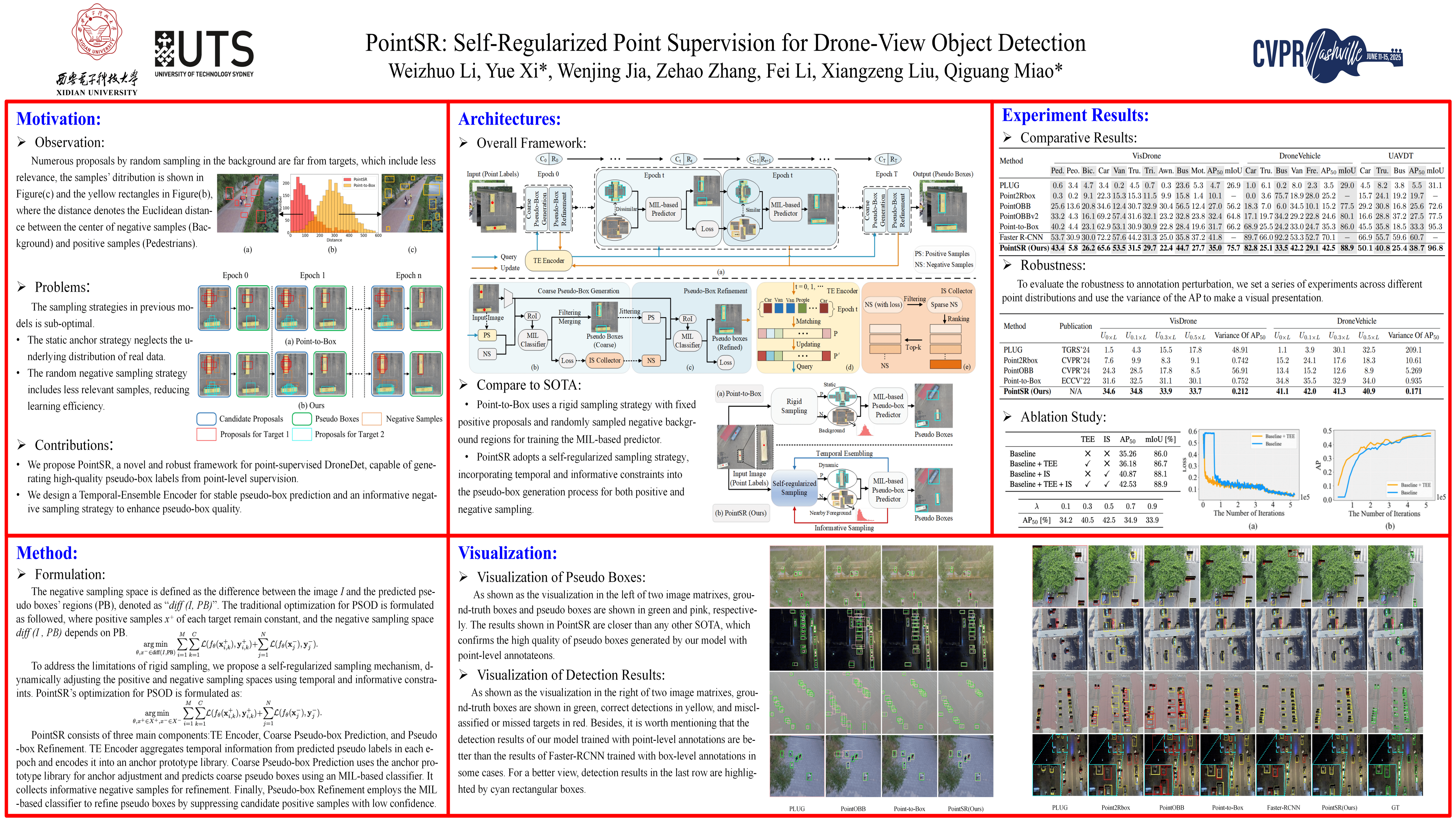
PointSR: Self-Regularized Point Supervision for Drone-View Object Detection
Weizhuo Li ⋅ Yue Xi ⋅ Wenjing Jia ⋅ zehao zhang ⋅ Fei Li ⋅ Xiangzeng Liu ⋅ Qiguang Miao
2025 Poster
{kind=link}
Abstract
Point-Supervised Object Detection (PSOD) in a discriminative style has recently gained significant attention for its impressive detection performance and cost-effectiveness. However, accurately predicting high-quality pseudo-box labels for drone-view images, which often feature densely packed small objects, remains a challenge. This difficulty arises primarily from the limitation of rigid sampling strategies, which hinder the optimization of pseudo-boxes. To address this, we propose PointSR, an effective and robust point-supervised object detection framework with self-regularized sampling that integrates temporal and informative constraints throughout the pseudo-box generation process. Specifically, the framework comprises three key components: Temporal-Ensembling Encoder (TE Encoder), Coarse Pseudo-box Prediction, and Pseudo-box Refinement. The TE Encoder builds an anchor prototype library by aggregating temporal information for dynamic anchor adjustment. In Coarse Pseudo-box Prediction, anchors are refined using the prototype library, and a set of informative samples is collected for subsequent refinement. During Pseudo-box Refinement, these informative negative samples are used to suppress low-confidence candidate positive samples, thereby improving the quality of the pseudo boxes. Experimental results on benchmark datasets demonstrate that PointSR significantly outperforms state-of-the-art methods, achieving up to $\mathbf{3.3}$%$\sim$$\mathbf{7.2}$% higher AP$_{50}$ using only point supervision. Additionally, it exhibits strong robustness to perturbation in human-labeled points.
Chat is not available.
Successful Page Load