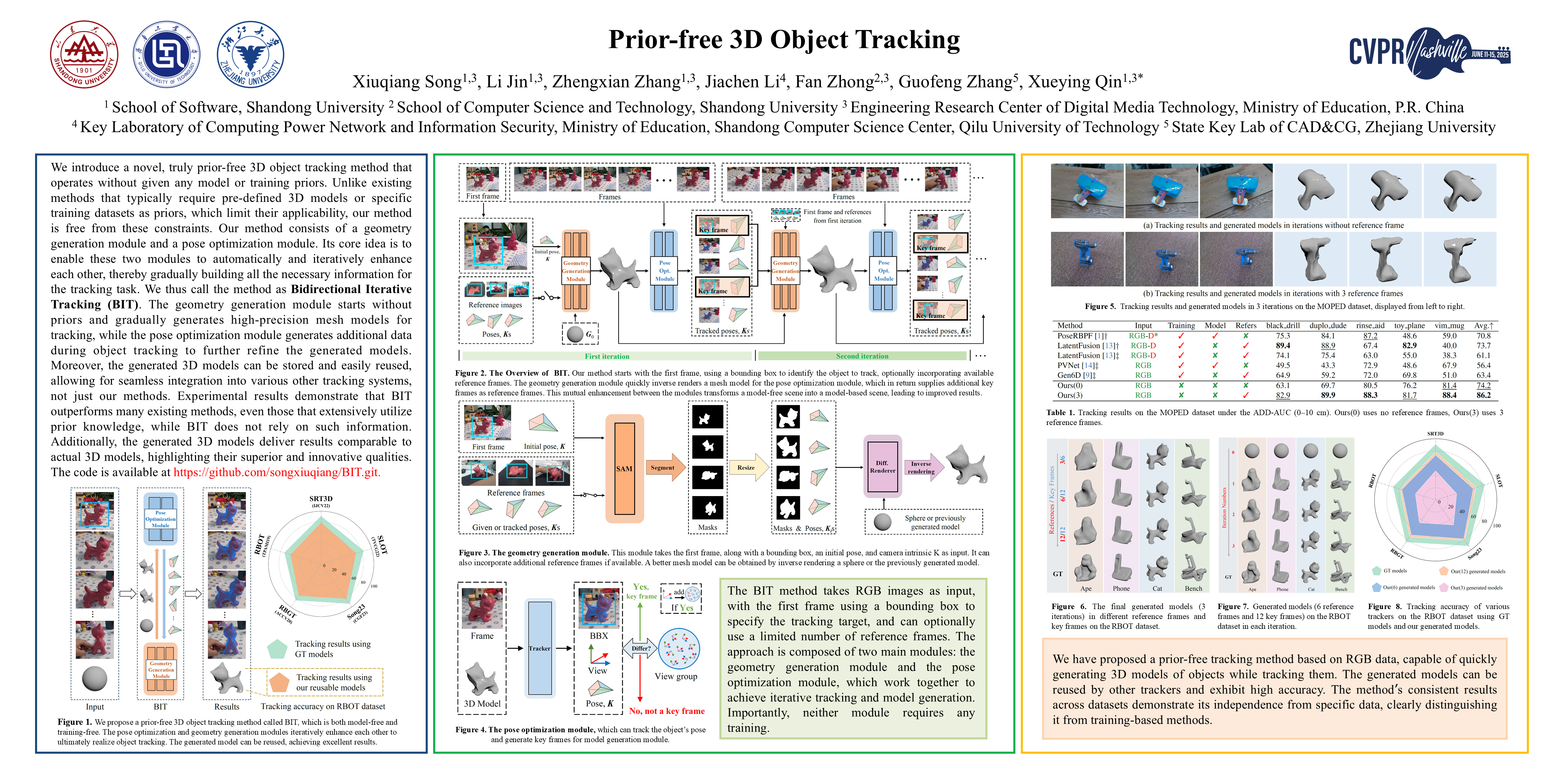
Prior-free 3D Object Tracking
 Highlight
Highlight
{kind=link}
Abstract
In this paper, we introduce a novel, truly prior-free 3D object tracking method that operates without given any model or training priors. Unlike existing methods that typically require pre-defined 3D models or specific training datasets as priors, which limit their applicability, our method is free from these constraints. Our method consists of a geometry generation module and a pose optimization module. Its core idea is to enable these two modules to automatically and iteratively enhance each other, thereby gradually building all the necessary information for the tracking task. We thus call the method as Bidirectional Iterative Tracking(BIT). The geometry generation module starts without priors and gradually generates high-precision mesh models for tracking, while the pose optimization module generates additional data during object tracking to further refine the generated models. Moreover, the generated 3D models can be stored and easily reused, allowing for seamless integration into various other tracking systems, not just our methods. Experimental results demonstrate that BIT outperforms many existing methods, even those that extensively utilize prior knowledge, while BIT does not rely on such information. Additionally, the generated 3D models deliver results comparable to actual 3D models, highlighting their superior and innovative qualities.