CoMapGS: Covisibility Map-based Gaussian Splatting for Sparse Novel View Synthesis
{kind=link}
Abstract
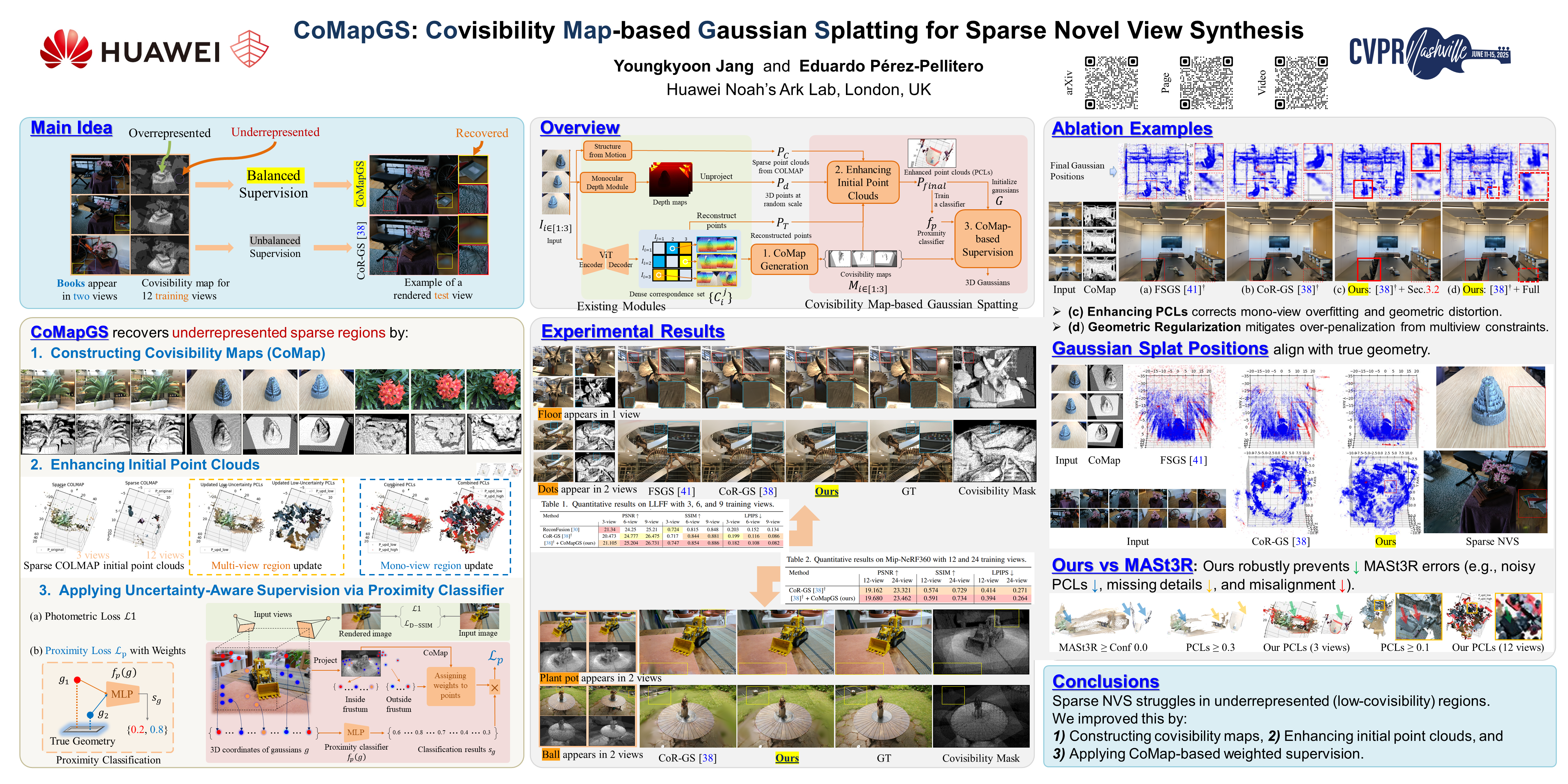
We propose Covisibility Map-based Gaussian Splatting (CoMapGS), designed to recover underrepresented sparse regions in sparse novel view synthesis. CoMapGS addresses both high- and low-uncertainty regions by constructing covisibility maps, enhancing initial point clouds, and applying uncertainty-aware weighted supervision with a proximity classifier. Our contributions are threefold: (1) CoMapGS reframes novel view synthesis by leveraging covisibility maps as a core component to address region-specific uncertainty levels; (2) Enhanced initial point clouds for both low- and high-uncertainty regions compensate for sparse COLMAP-derived point clouds, improving reconstruction quality and benefiting few-shot 3DGS methods; (3) Adaptive supervision with covisibility-score-based weighting and proximity classification achieves consistent performance gains across scenes with various sparsity scores derived from covisibility maps. Experimental results demonstrate that CoMapGS outperforms state-of-the-art methods on datasets including Mip-NeRF 360 and LLFF.