DriveScape: High-Resolution Driving Video Generation by Multi-View Feature Fusion
{kind=link}
Abstract
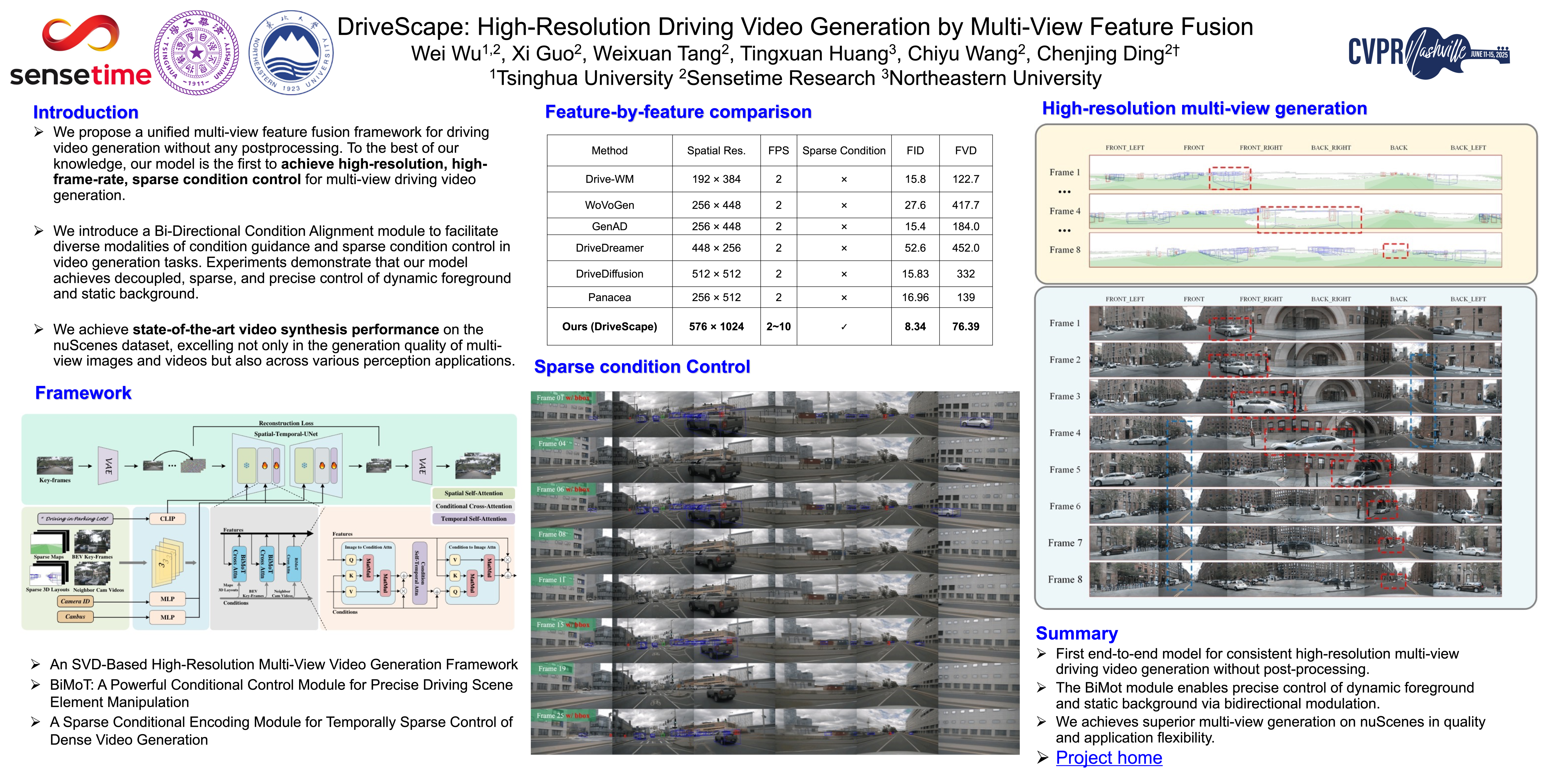
Recent advancements in generative models offer promising solutions for synthesizing realistic driving videos, aiding in training autonomous driving perception models. However, existing methods often struggle with high-resolution multi-view generation, mainly due to the significant memory and computational overhead caused by simultaneously inputting multi-view videos into denoising diffusion models.In this paper, we propose a driving video generation framework based on multi-view feature fusion named DriveScape for multi-view 3D condition-guided video generation. We introduce a Bi-Directional Modulated Transformer (BiMoT) module to encode, fuse and inject multi-view features along with various 3D road structures and objects, which enables high-resolution multi-view generation. Consequently, our approach allows precise control over video generation, greatly enhancing realism and providing a robust solution for creating high-quality, multi-view driving videos.Our framework achieves state-of-the-art results on the nuScenes dataset, demonstrating impressive generative quality metrics with an FID score of 8.34 and an FVD score of \textbf{76.39}, as well as superior performance across various perception tasks. This lays the foundation for more accurate environment simulation in autonomous driving. We plan to make our code and pre-trained model publicly available.Please refer to index.html webpage in the supplementary materials for more visualization results.