Sea-ing in Low-light
{kind=link}
Abstract
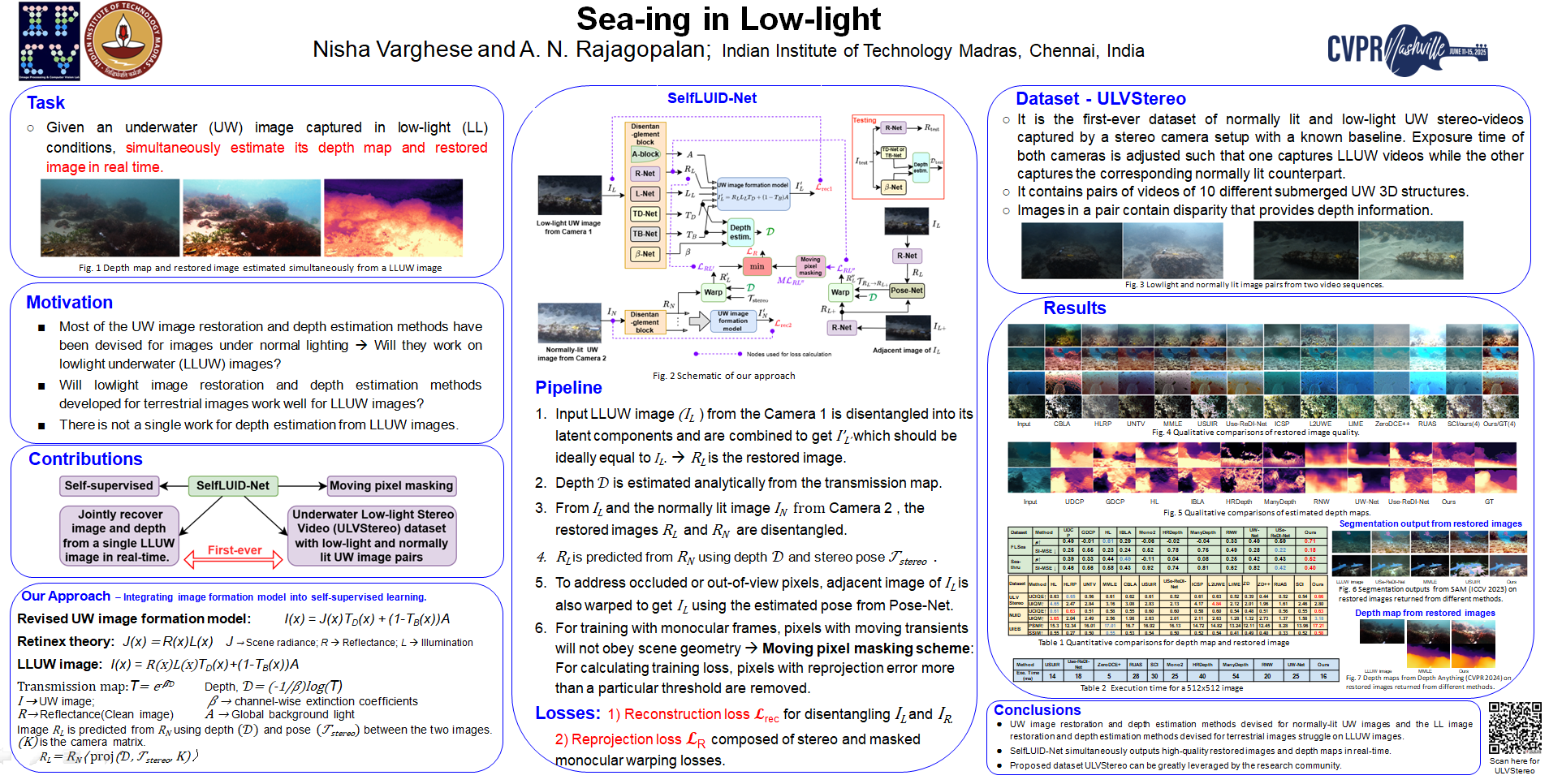
Underwater (UW) robotics applications require depth and restored images simultaneously in real-time, irrespective of whether the UW images are captured in good lighting conditions or not. Most of the UW image restoration and depth estimation methods have been devised for images under normal lighting. Consequently, they struggle to perform on poorly lit images. Even though artificial illumination can be used when there is insufficient ambient light, it can introduce non-uniform lighting artifacts in the restored images. Hence, the recovery of depth and restored images directly from Low-Light UW (LLUW) images is a critical requirement in marine applications. While a few works have attempted LLUW image restoration, there are no reported works on joint recovery of depth and clean image from LLUW images. We propose a Self-supervised Low-light Underwater Image and Depth recovery network (SelfLUID-Net) for joint estimation of depth and restored image in real-time from a single LLUW image. We have collected an Underwater Low-light Stereo Video (ULVStereo) dataset which is the first-ever UW dataset with stereo pairs of low-light and normally-lit UW images. For the dual tasks of image and depth recovery from a LLUW image, we effectively utilize the stereo data from ULVStereo that provides cues for both depth and illumination-independent clean image. We harness a combination of the UW image formation process, the Retinex model, and constraints enforced by the scene geometry for our self-supervised training. To handle occlusions, we additionally utilize monocular frames from our video dataset and propose a masking scheme to prevent dynamic transients, that do not respect the underlying scene geometry, from misguiding the learning process. Evaluations on five LLUW datasets demonstrate the superiority and generalization ability of our proposed SelfLUID-Net over existing state-of-the-art methods.