MAD: Memory-Augmented Detection of 3D Objects
{kind=link}
Abstract
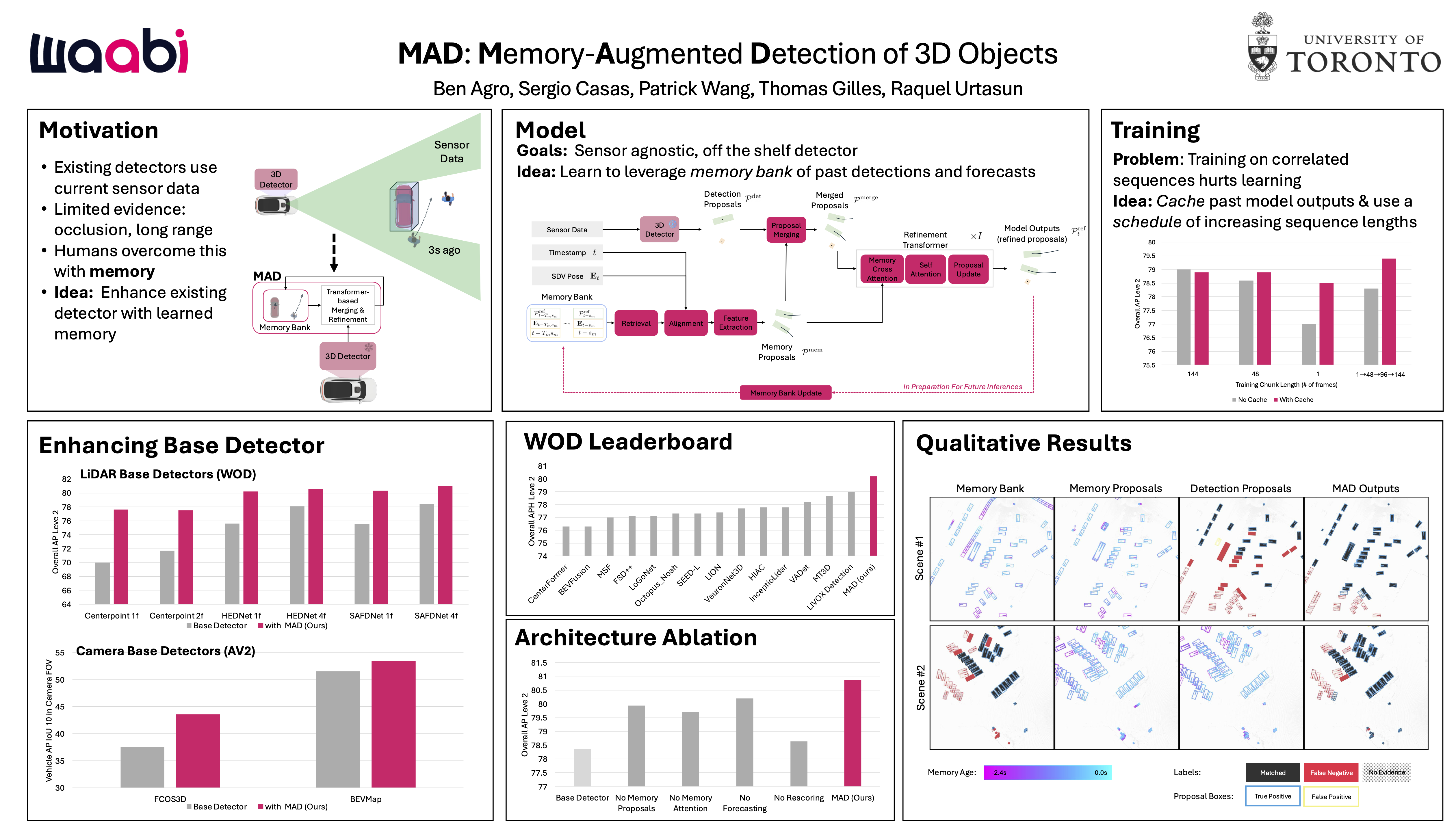
To perceive, humans use memory to fill in gaps caused by our limited visibility, whether due to occlusion or our narrow field of view. However, most 3D object detectors are limited to using sensor evidence from a short temporal window (0.1s-0.3s). In this work, we present a simple and effective add-on for enhancing any existing 3D object detector with long-term memory regardless of its sensor modality (e.g., LiDAR, camera) and network architecture. We propose a model to effectively align and fuse object proposals from a detector with object proposals from a memory bank of past predictions, exploiting trajectory forecasts to align proposals across time. We propose a novel schedule to train our model on temporal data that balances data diversity and the gap between training and inference. By applying our method to existing LiDAR and camera-based detectors on the Waymo Open Dataset (WOD) and Argoverse 2 Sensor (AV2) dataset, we demonstrate significant improvements in detection performance (+2.5 to +7.6 AP points). Our method attains the best performance on the WOD 3D detection leaderboard among online methods (excluding ensembles or test-time augmentation).