Leveraging Global Stereo Consistency for Category-Level Shape and 6D Pose Estimation from Stereo Images
{kind=link}
Abstract
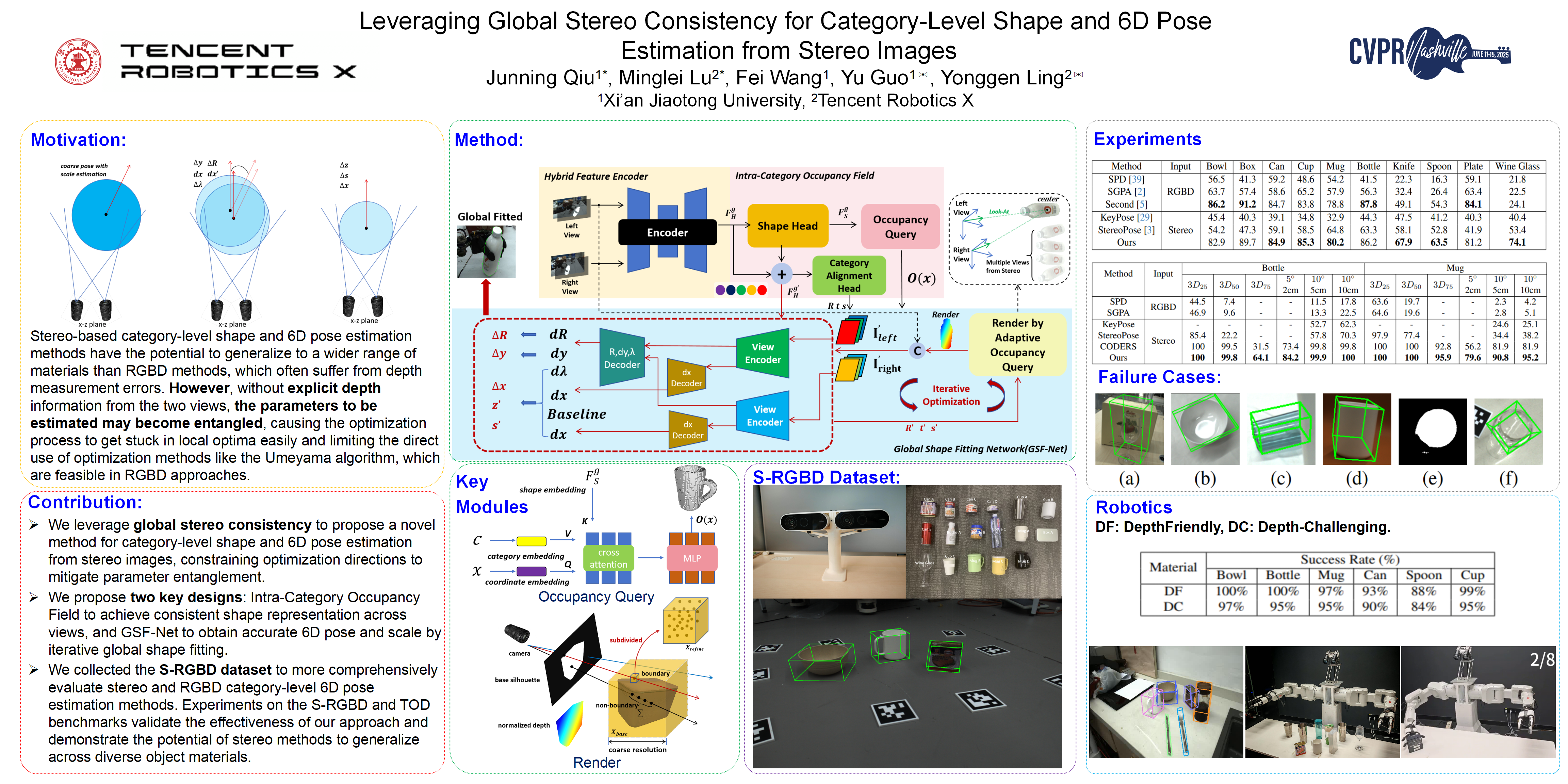
Stereo-based category-level shape and 6D pose estimation methods have the potential to generalize to a wider range of materials than RGB-D methods, which often suffer from depth measurement errors. However, without explicit depth from two views, parameters to be estimated can become inherently entangled, negatively impacting performance.To address this, we propose a method that leverages global stereo consistency to constrain optimization directions and mitigate parameter entanglement.We first estimate an intra-category occupancy field to represent a unified shape across views, ensuring consistency and preventing shape ambiguity. Through a divide-and-conquer approach within global shape fitting, we fit this shape to stereo images to obtain the pose, iteratively rendering normalized depth maps and exchanging information across views. This approach improves convergence toward the correct pose and scale.We validated our method on both depth-friendly and depth-challenging materials using our S-RGBD dataset and the TOD benchmark. Our method surpasses RGBD methods on challenging objects and performs comparably on depth-friendly ones. Ablation studies confirm the effectiveness of each component.