Generative Map Priors for Collaborative BEV Semantic Segmentation
{kind=link}
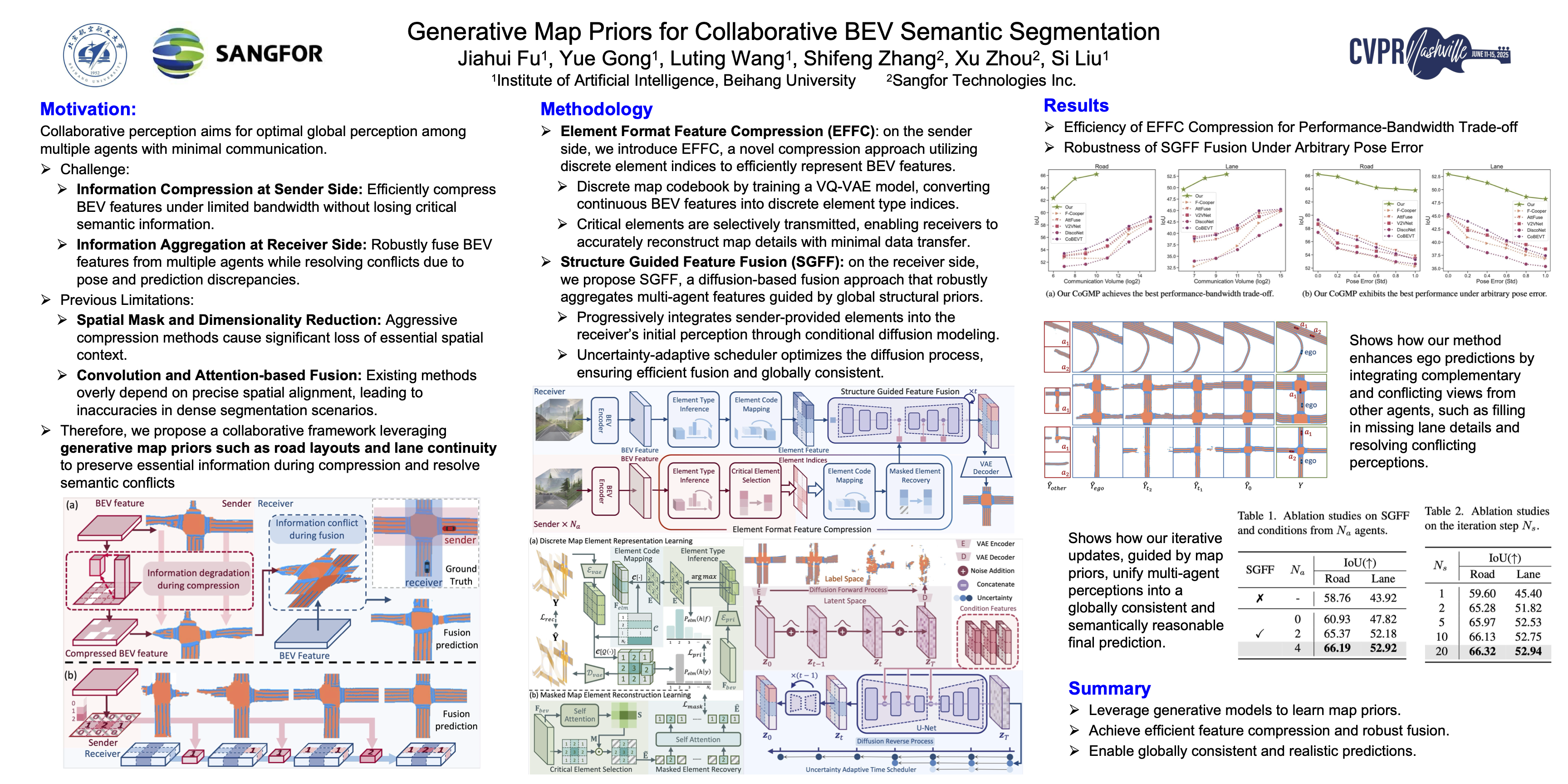
Abstract
Collaborative perception aims to address the constraint of single-agent perception by exchanging information among multiple agents. Previous works primarily focus on collaborative object detection, exploring compressed transmission and fusion prediction tailored to sparse object features. However, these strategies are not well-suited for dense features in collaborative BEV semantic segmentation. Therefore, we propose CoGMP, a novel Collaborative framework that leverages Generative Map Priors to achieve efficient compression and robust fusion. CoGMP introduces two key innovations: Element Format Feature Compression (EFFC) and Structure Guided Feature Fusion (SGFF). Specifically, EFFC leverages map element priors from codebook to encode BEV features as discrete element indices for transmitted information compression. Meanwhile, SGFF utilizes a diffusion model with structural priors to coherently integrate multi-agent features, thereby achieving consistent fusion predictions. Evaluations on the OPV2V dataset show that CoGMP achieves a 6.89/7.64 Road/Lane IoU improvement and a 32-fold reduction in communication volume. The code can be found in the supplementary materials.