Tartan IMU: A Light Foundation Model for Inertial Positioning in Robotics
{kind=link}
Abstract
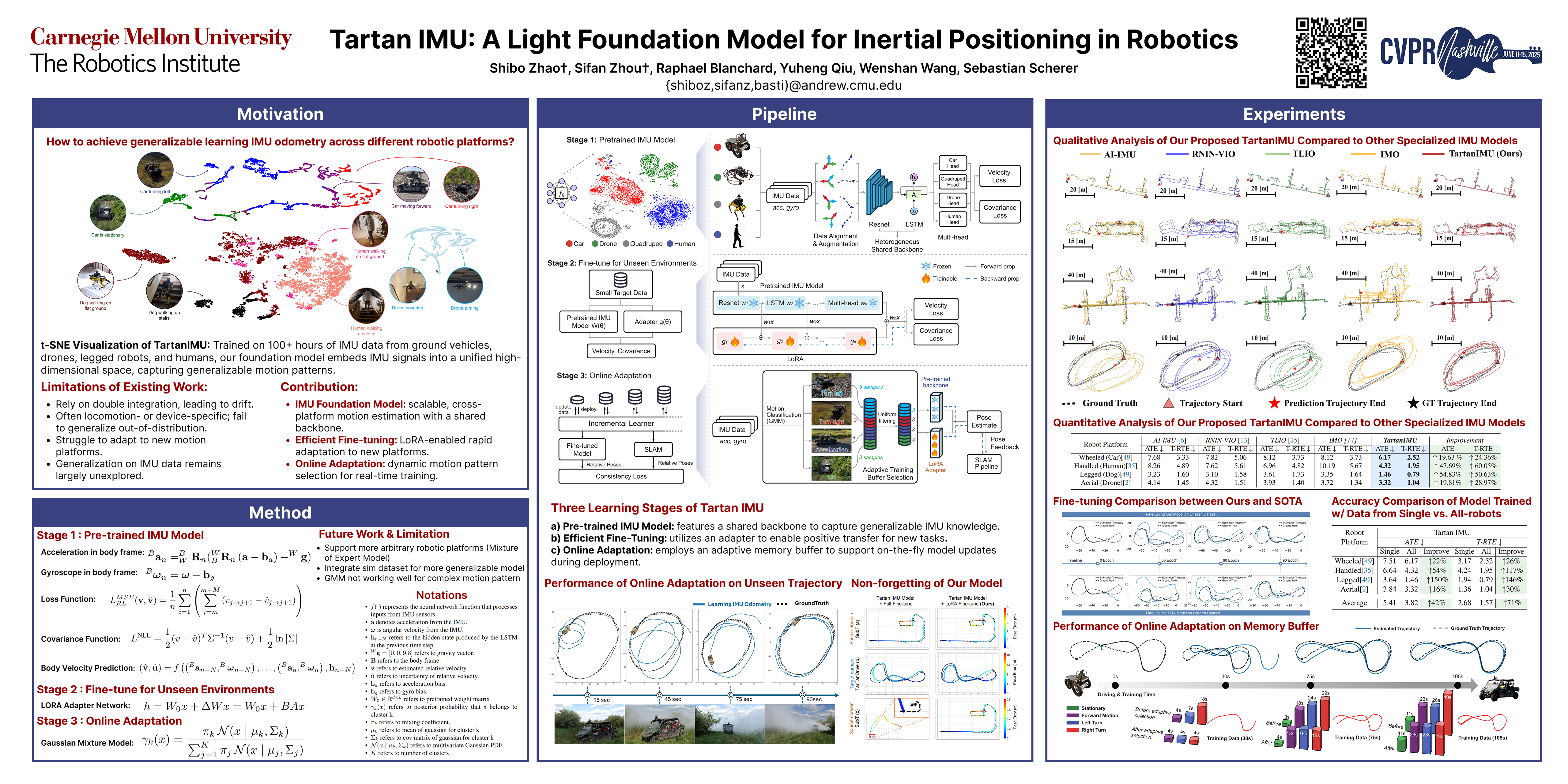
Despite recent advances in deep learning, most existing learning IMU odometry methods are trained on specific datasets, lack generalization, and are prone to overfitting, which limits their real-world application. To address these challenges, we present Tartan IMU, a foundation model designed for generalizable, IMU-based state estimation across diverse robotic platforms.Our approach consists of three-stage: First, a pre-trained foundation model leverages over 100 hours of multi-platform data to establish general motion knowledge, achieving 36\% improvement in ATE over specialized models. Second, to adapt to previously unseen tasks, we employ the Low-Rank Adaptation (LoRA), allowing positive transfer with only 1.1 M trainable parameters. Finally, to support robotics deployment, we introduce online test-time adaptation, which eliminates the boundary between training and testing, allowing the model to continuously "learn as it operates" at 200 FPS in real-time.