GraphI2P: Image-to-Point Cloud Registration with Exploring Pattern of Correspondence via Graph Learning
{kind=link}
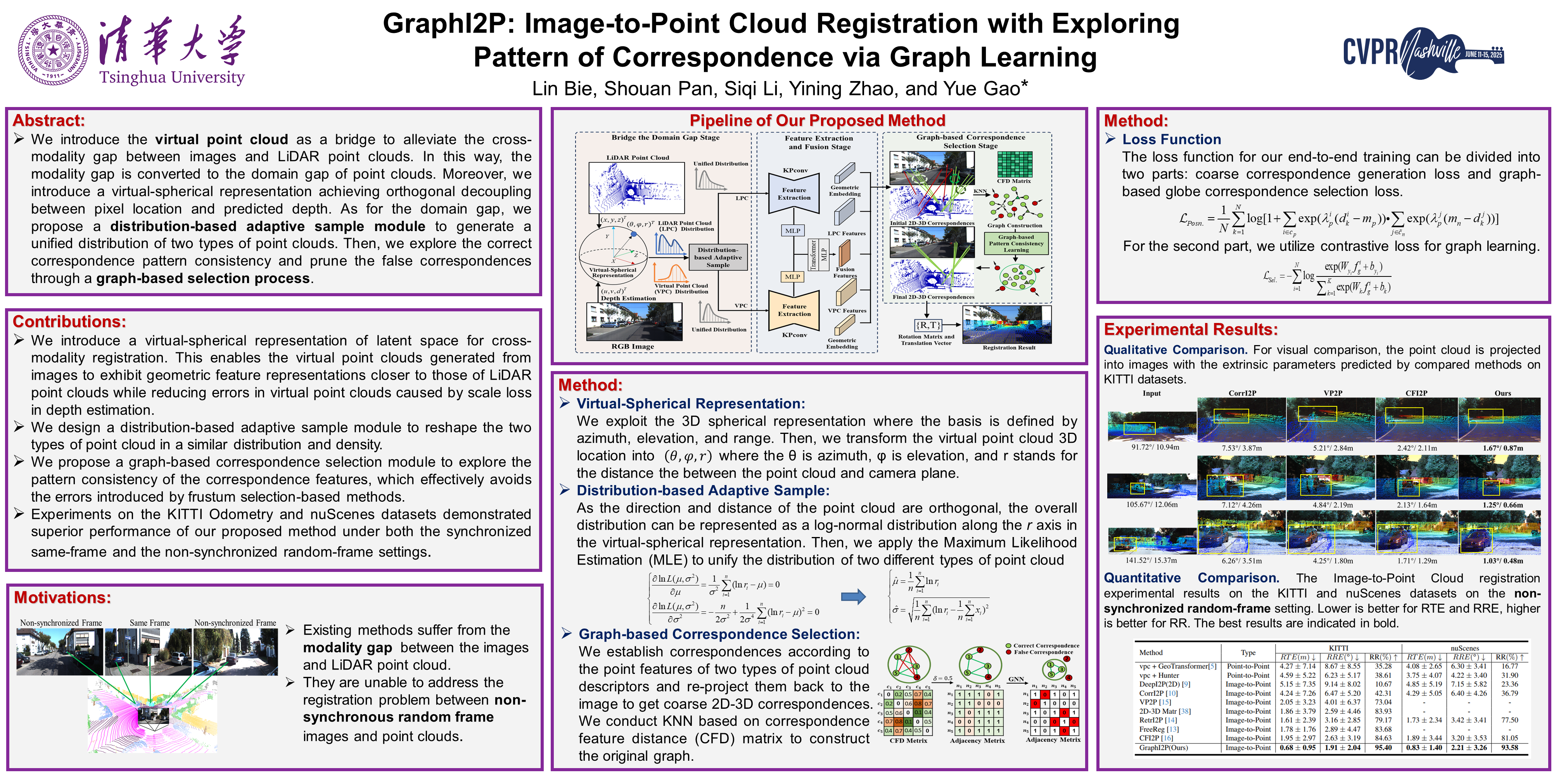
Abstract
Although the fusion of images and LiDAR point clouds is crucial to many applications in computer vision, the relative poses of cameras and LiDAR scanners are often unknown. The general registration pipeline first establishes correspondences and then performs pose estimation based on the generated matches. However, 2D-3D correspondences are inherently challenging to establish due to the large gap between images and LiDAR point clouds. To this end, we build a bridge to alleviate the 2D-3D gap and propose a practical framework to align LiDAR point clouds to the virtual points generated by images. In this way, the modality gap is converted to the domain gap of point clouds. Moreover, we propose a virtual-spherical representation and adaptive distribution sample module to narrow the domain gap between virtual and LiDAR point clouds. Then, we explore the reliable correspondence pattern consistency through a graph-based selection process. We improve the correspondence representation through a graph neural network. Experimental results demonstrate that our method outperforms the state-of-the-art methods by more than 10.77% and 12.53% performance on the KITTI Odometry and nuScenes datasets, respectively. The results demonstrate that our method can effectively solve non-synchronized random frame registration.