RDD: Robust Feature Detector and Descriptor using Deformable Transformer
{kind=link}
Abstract
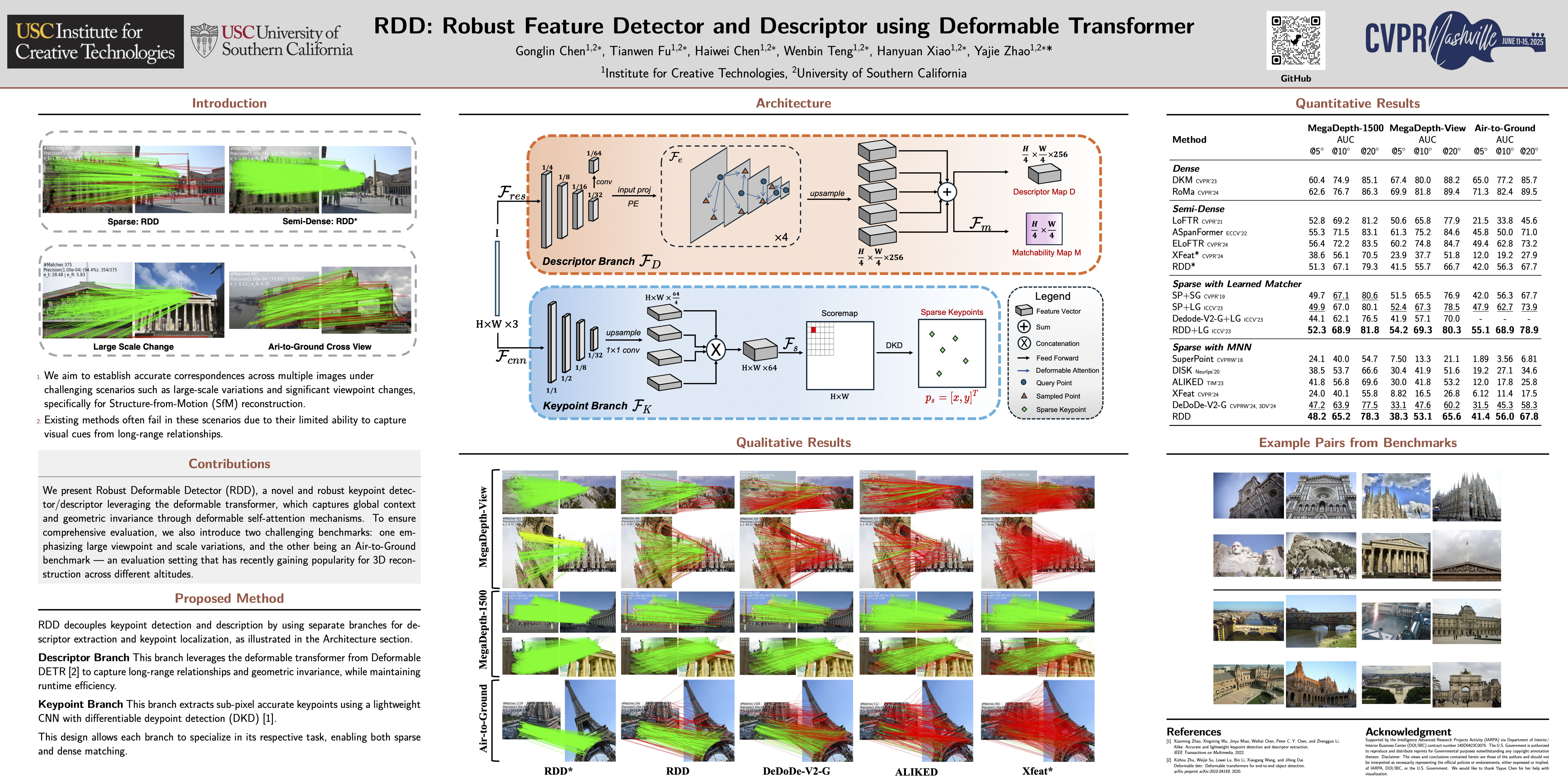
As a core step in structure-from-motion and SLAM, robust feature detection and description under challenging scenarios such as significant viewpoint changes remain unresolved despite their ubiquity. While recent works have identified the importance of local features in modeling geometric transformations, these methods fail to learn the visual cues present in long-range relationships. We present RDD, a novel and robust keypoint detector/descriptor leveraging the deformable transformer, which captures global context and geometric invariance through deformable self-attention mechanisms. Specifically, we observed that deformable attention focuses on key locations, effectively reducing the search space complexity and modeling the geometric invariance. Furthermore, we introduce a novel refinement module for semi-dense matching, which does not rely on fine-level features. Our proposed methods outperform all state-of-the-art keypoint detection/description methods in feature matching, pose estimation, and visual localization tasks. To ensure comprehensive evaluation, we introduce two challenging benchmarks: one emphasizing large viewpoint and scale variations, and the other being a novel Air-to-Ground benchmark — an evaluation setting which has gained popularity in recent years for 3D reconstruction at different altitudes. Our code and benchmarks will be released upon acceptance of the paper.