Seeing is Not Believing: Adversarial Natural Object Optimization for Hard-Label 3D Scene Attacks
{kind=link}
Abstract
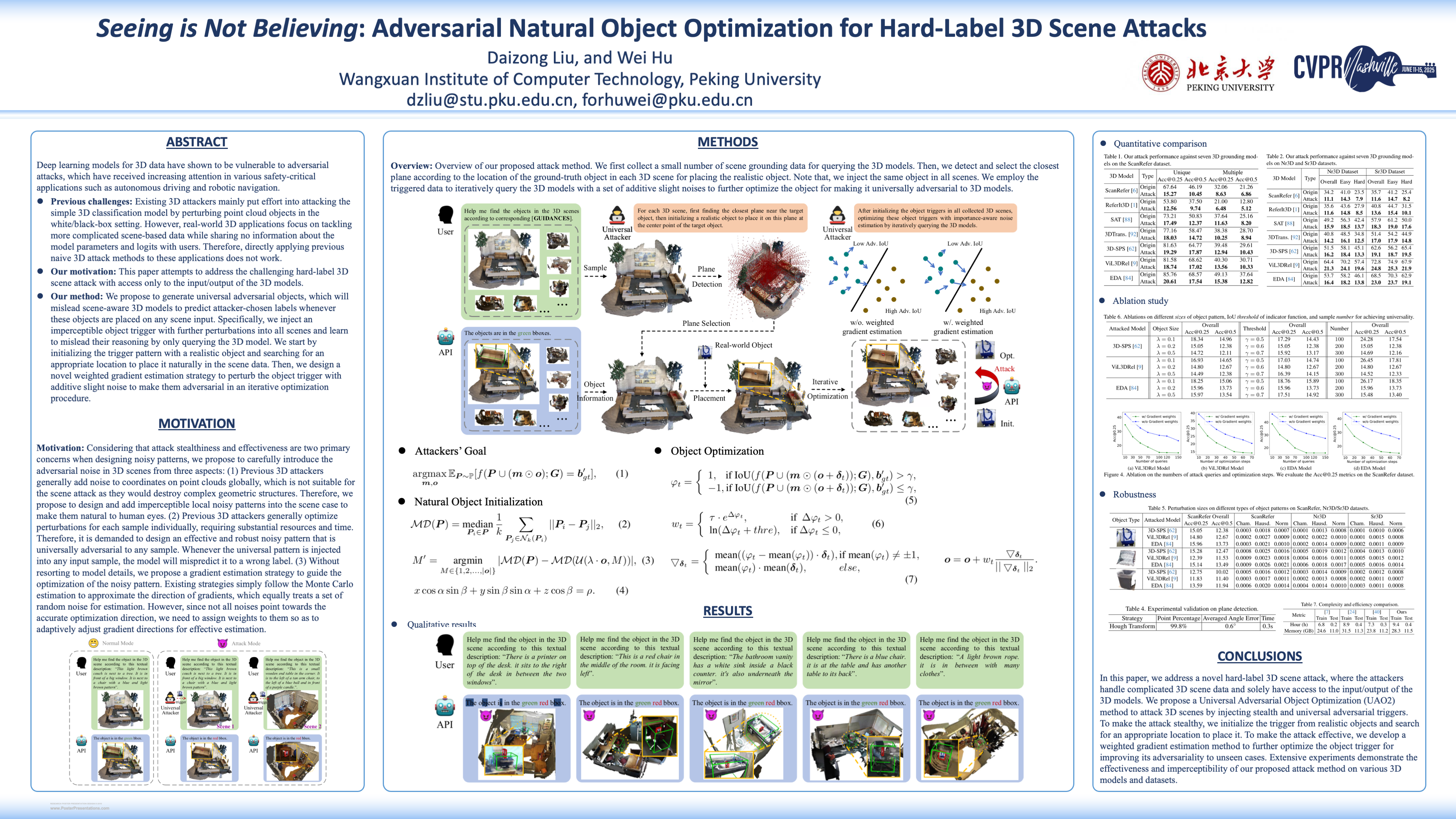
Deep learning models for 3D data have shown to be vulnerable to adversarial attacks, which have received increasing attention in various safety-critical applications such as autonomous driving and robotic navigation. Existing 3D attackers mainly put effort into attacking the simple 3D classification model by perturbing point cloud objects in the white/black-box setting. However, real-world 3D applications focus on tackling more complicated scene-based data while sharing no information about the model parameters and logits with users. Therefore, directly applying previous naive 3D attack methods to these applications does not work. To this end, this paper attempts to address the challenging hard-label 3D scene attack with access only to the input/output of the 3D models. To make the attack effective and stealthy, we propose to generate universal adversarial objects, which will mislead scene-aware 3D models to predict attacker-chosen labels whenever these objects are placed on any scene input. Specifically, we inject an imperceptible object trigger with further perturbations into all scenes and learn to mislead their reasoning by only querying the 3D model. We start by initializing the trigger pattern with a realistic object and searching for an appropriate location to place it naturally in the scene data. Then, we design a novel weighted gradient estimation strategy to perturb the object trigger with additive slight noise to make them adversarial in an iterative optimization procedure. Extensive experiments demonstrate that our attack can achieve superior performance on seven 3D models and three scene-based datasets, with satisfactory adversarial imperceptibility and strong resistance to defense methods.