Feature Information Driven Position Gaussian Distribution Estimation for Tiny Object Detection
{kind=link}
Abstract
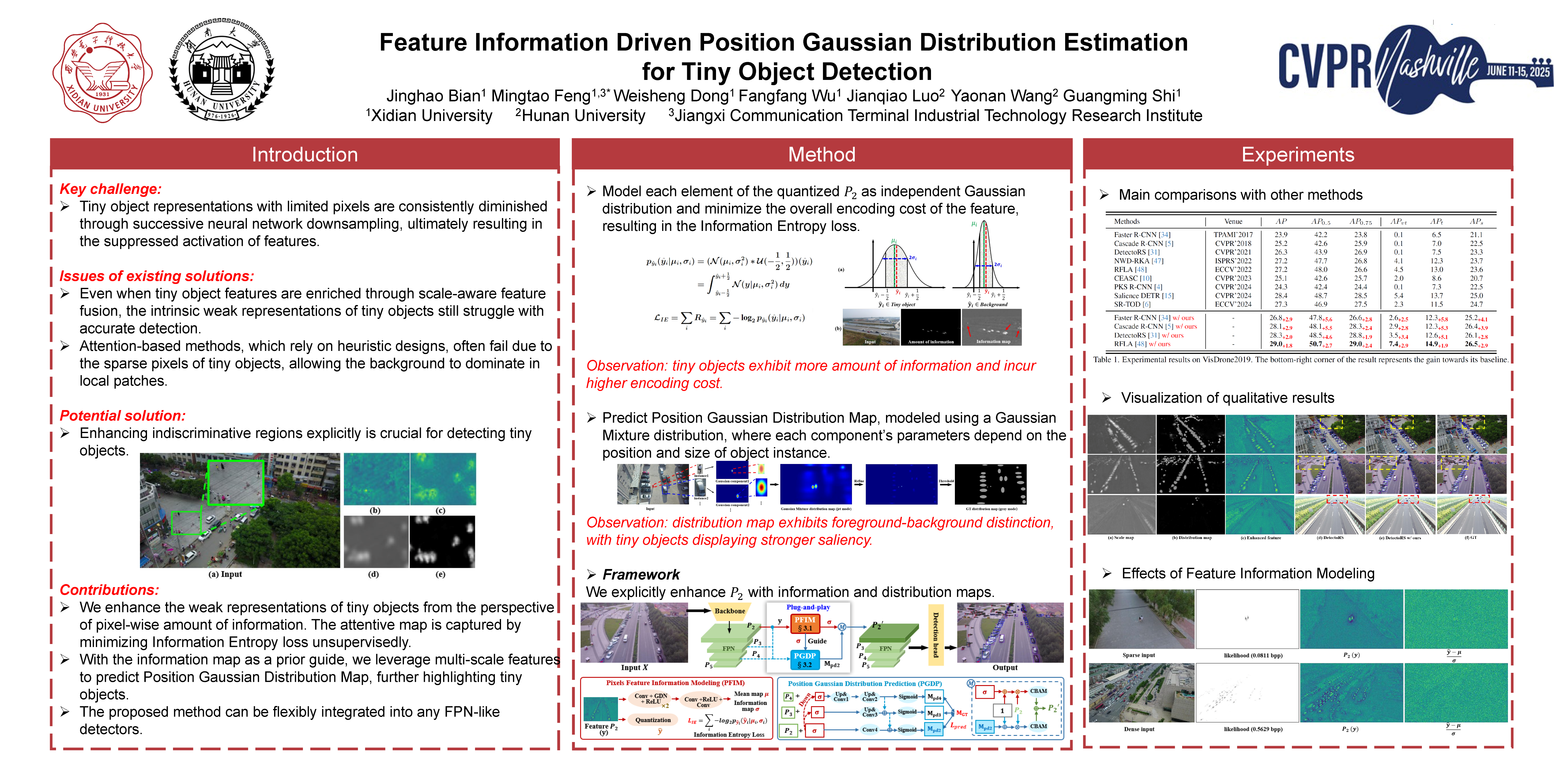
Tiny object detection remains challenging in spite of the success of generic detectors. The dramatic performance degradation of generic detectors on tiny objects is mainly due to the the weak representations of extremely limited pixels. To address this issue, we propose a plug-and-play architecture to enhance the extinguished regions. We for the first time exploit the regions to be enhanced from the perspective of pixel-wise amount of information. Specifically, we model the entire image pixels feature information by minimizing Information Entropy loss, generating an information map to attentively highlight weak activated regions in an unsupervised way. To effectively assist the above phase with more attention to tiny objects, we next introduce the Position Gaussian Distribution Map, explicitly modeled using a Gaussian Mixture distribution, where each Gaussian component's parameters depend on the position and size of object instance labels, serving as supervision for further feature enhancement. Taking the information map as prior knowledge guidance, we construct a multi-scale position gaussian distribution map prediction module, simultaneously modulating the information map and distribution map to focus on tiny objects during training. Extensive experiments on three public tiny object datasets demonstrate the superiority of our method over current state-of-the-art competitors. The code is available at https://anonymous.4open.science/r/Information_TOD-19F1.