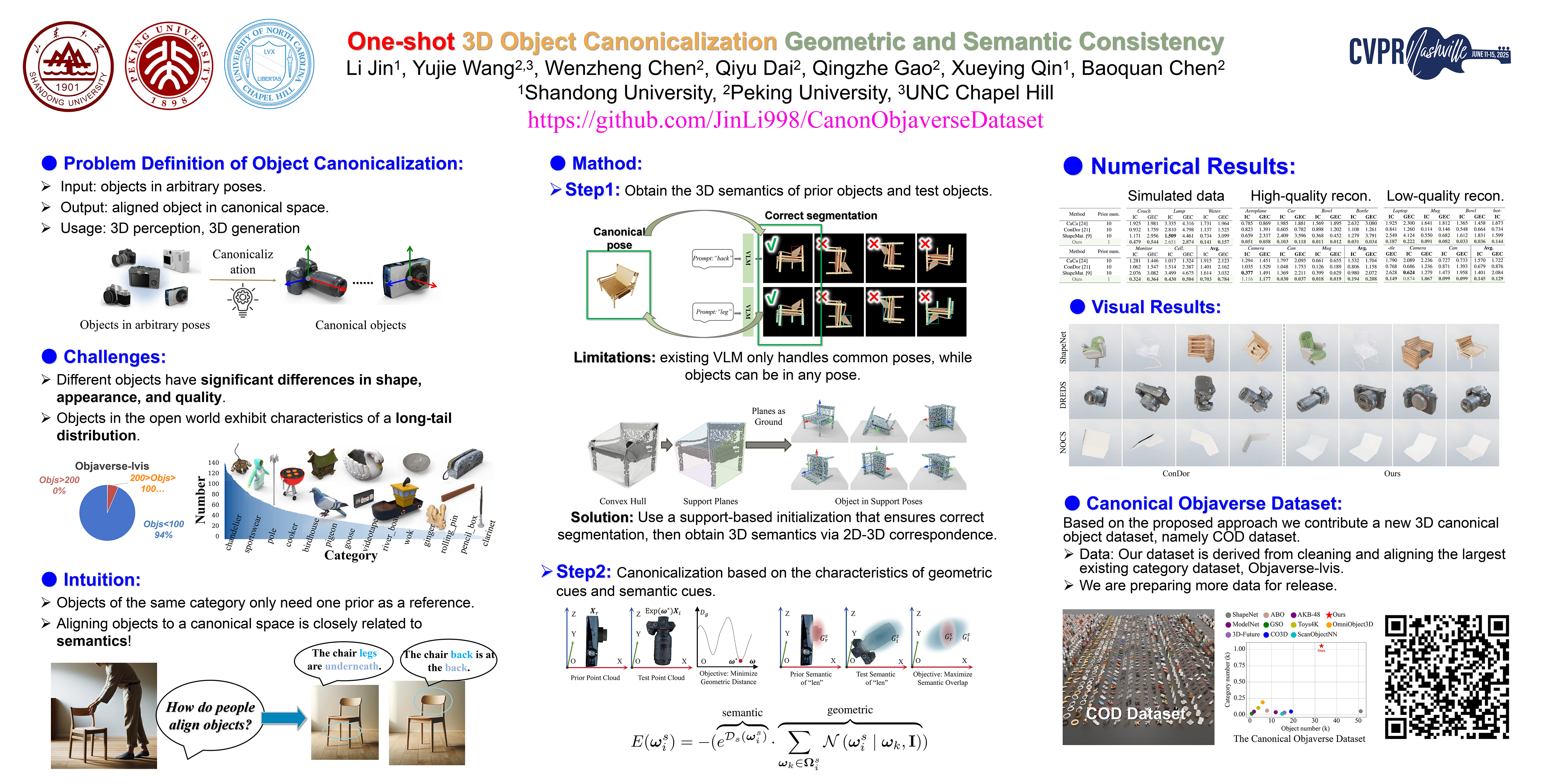
One-shot 3D Object Canonicalization based on Geometric and Semantic Consistency
 Highlight
Highlight
{kind=link}
Abstract
3D object canonicalization is a fundamental task, essential for a variety of downstream tasks. Existing methods rely on either cumbersome manual processes or priors learned from extensive, per-category training samples. Real-world datasets, however, often exhibit long-tail distributions, challenging existing learning-based methods, especially in categories with limited samples. We address this by introducing the first one-shot category-level object canonicalization framework, requiring only a single canonical model as a reference (the "prior model") for each category. To canonicalize any object, our framework first extracts semantic cues with large language models (LLMs) and vision-language models (VLMs) to establish correspondences with the prior model. We introduce a novel loss function to enforce geometric and semantic consistency, aligning object orientations precisely despite significant shape variations. Moreover, we adopt a support-plane strategy to reduce search space for initial poses and utilize a semantic relationship map to select the canonical pose from multiple hypotheses. Extensive experiments on multiple datasets demonstrate that our framework achieves state-of-the-art performance and validate key design choices. Using our framework, we create the Canonical Objaverse Dataset (COD), canonicalizing 33K samples in the Objaverse-LVIS dataset, underscoring the effectiveness of our framework on handling large-scale datasets.