Practical Solutions to the Relative Pose of Three Calibrated Cameras
{kind=link}
Abstract
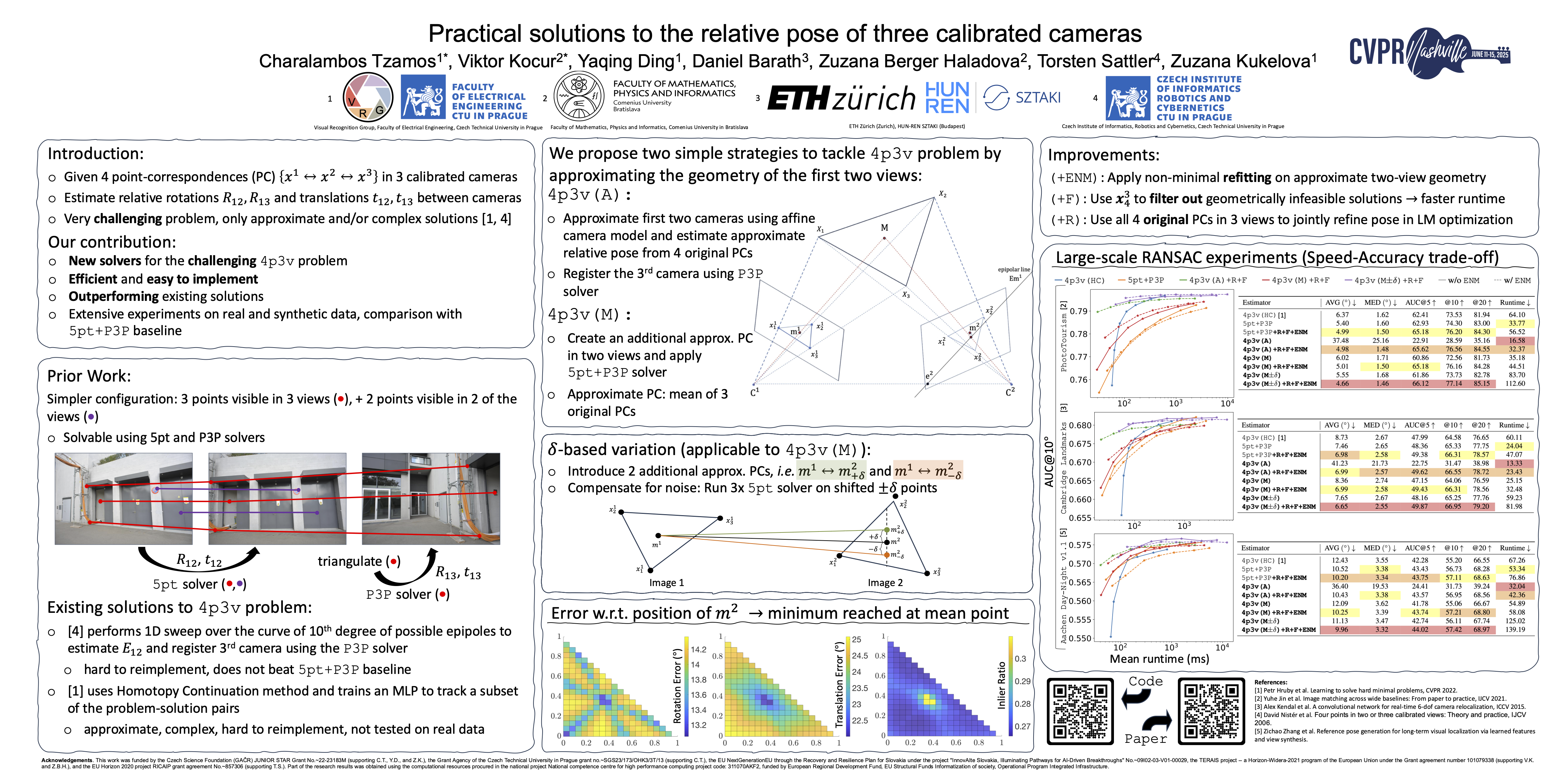
We study the challenging problem of estimating the relative pose of three calibrated cameras from four point correspondences. We propose novel efficient solutions to this problem that are based on the simple idea of using four correspondences to estimate an approximate geometry of the first two views. We model this geometry either as an affine or a fully perspective geometry estimated using one additional approximate correspondence. We generate such an approximate correspondence using a very simple and efficient strategy, where the new point is the mean point of three corresponding input points. The new solvers are efficient and easy to implement, since they are based on existing efficient minimal solvers, i.e., the 4-point affine fundamental matrix, the well-known 5-point relative pose solver, and the \texttt{P3P} solver. Extensive experiments on real data show that the proposed solvers, when properly coupled with local optimization, achieve state-of-the-art results, with the novel solver based on approximate mean-point correspondences being more robust and precise than the affine-based solver.