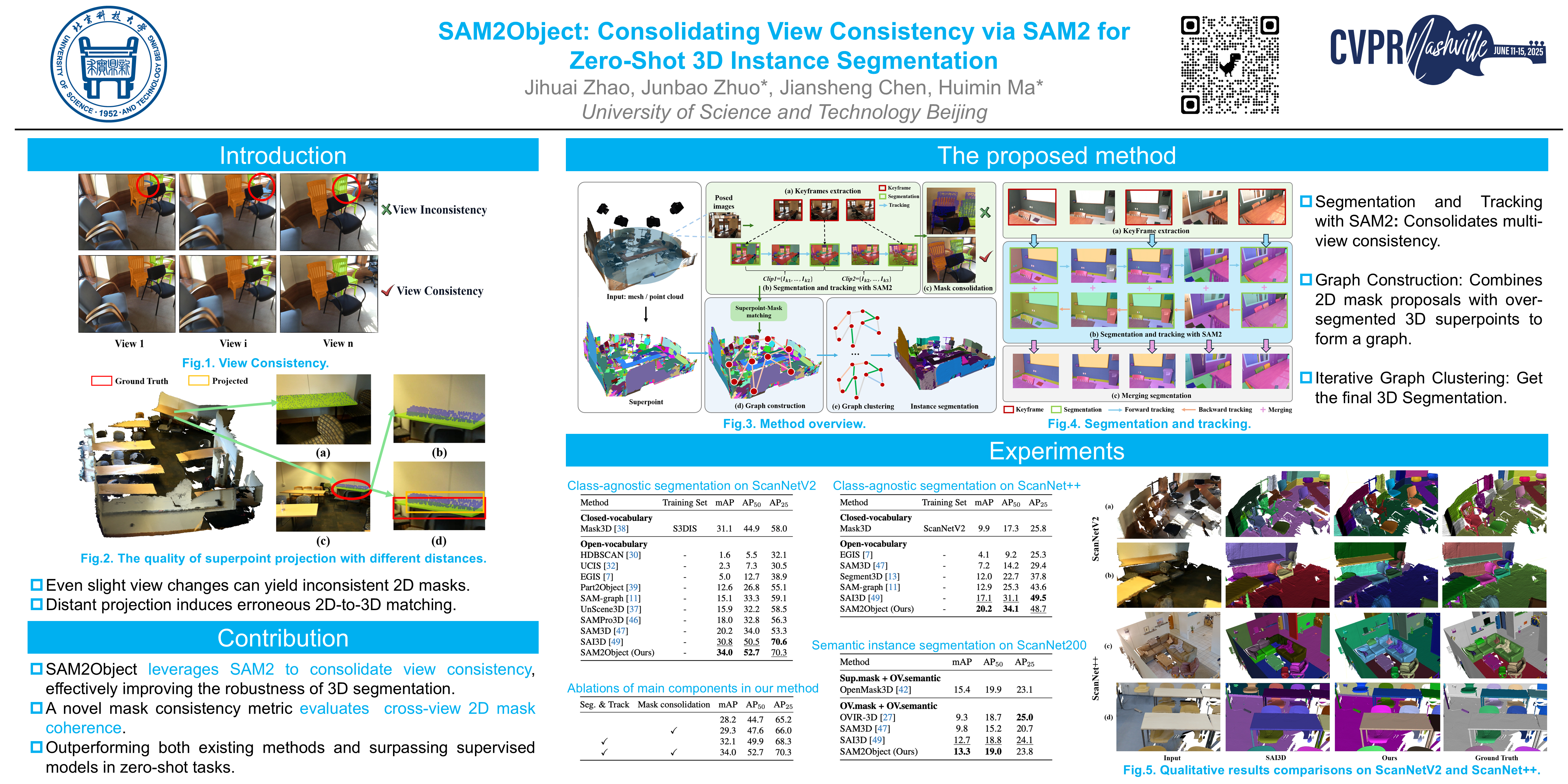
SAM2Object: Consolidating View Consistency via SAM2 for Zero-Shot 3D Instance Segmentation
{kind=link}
Abstract
In the field of zero-shot 3D instance segmentation, existing 2D-to-3D lifting methods typically obtain 2D segmentation across multiple RGB frames using vision foundation models, which are then projected and merged into 3D space. However, since the inference of vision foundation models on a single frame is not integrated with adjacent frames, the masks of the same object may vary across different frames, leading to a lack of view consistency in the 2D segmentation. Furthermore, current lifting methods average the 2D segmentation from multiple views during the projection into 3D space, causing low-quality masks and high-quality masks to share the same weight. These factors can lead to fragmented 3D segmentation. In this paper, we present SAM2Object, a novel zero-shot 3D instance segmentation method that effectively utilizes the Segment Anything Model 2 to segment and track objects, consolidating view consistency across frames. Our approach combines these consistent 2D masks with 3D geometric priors, improving the robustness of 3D segmentation. Additionally, we introduce mask consolidation module to filter out low-quality masks across frames, which enables more precise 3D-to-2D matching. Comprehensive evaluations on ScanNetV2, ScanNet++ and ScanNet200 demonstrate the robustness and effectiveness of SAM2Object, showcasing its ability to outperform previous methods.