SceneDiffuser++: City-Scale Traffic Simulation via a Generative World Model
{kind=link}
Abstract
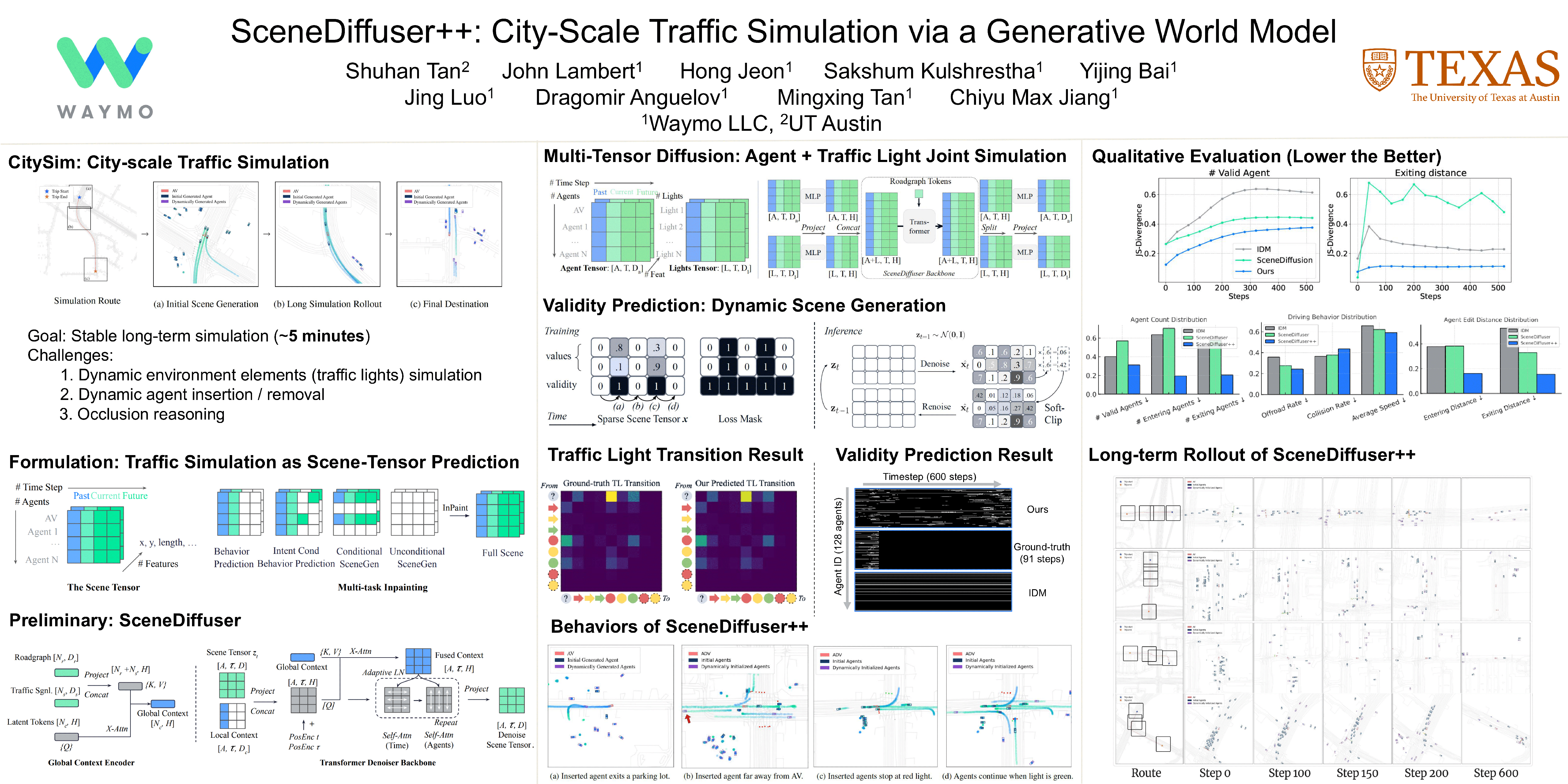
The goal of traffic simulation is to augment a potentially limited amount of manually-driven miles that is available for testing and validation, with a much larger amount of simulated synthetic miles. The culmination of this vision would be a generative simulated city, where given a map of the city and an autonomous vehicle (AV) software stack, the simulator can seamlessly simulate the trip from point A to point B by populating the city around the AV and controlling all aspects of the scene, from animating the dynamic agents (e.g., vehicles, pedestrians) to controlling the traffic light states. We refer to this vision as CitySim, which requires an agglomeration of simulation technologies: scene generation to populate the initial scene, agent behavior modeling to animate the scene, occlusion reasoning, dynamic scene generation to seamlessly spawn and remove agents, and environment simulation for factors such as traffic lights. While some key technologies have been separately studied in various works, others such as dynamic scene generation and environment simulation have received less attention in the research community. We propose SceneDiffuser++, the first end-to-end generative world model trained on a single loss function capable of point A-to-B simulation on a city scale integrating all the requirements above. We demonstrate the city-scale traffic simulation capability of SceneDiffuser++ and study its superior realism under long simulation conditions.We evaluate the simulation quality on an augmented version of the Waymo Open Motion Dataset (WOMD) with larger map regions to support trip-level simulation.