FG^2: Fine-Grained Cross-View Localization by Fine-Grained Feature Matching
{kind=link}
Abstract
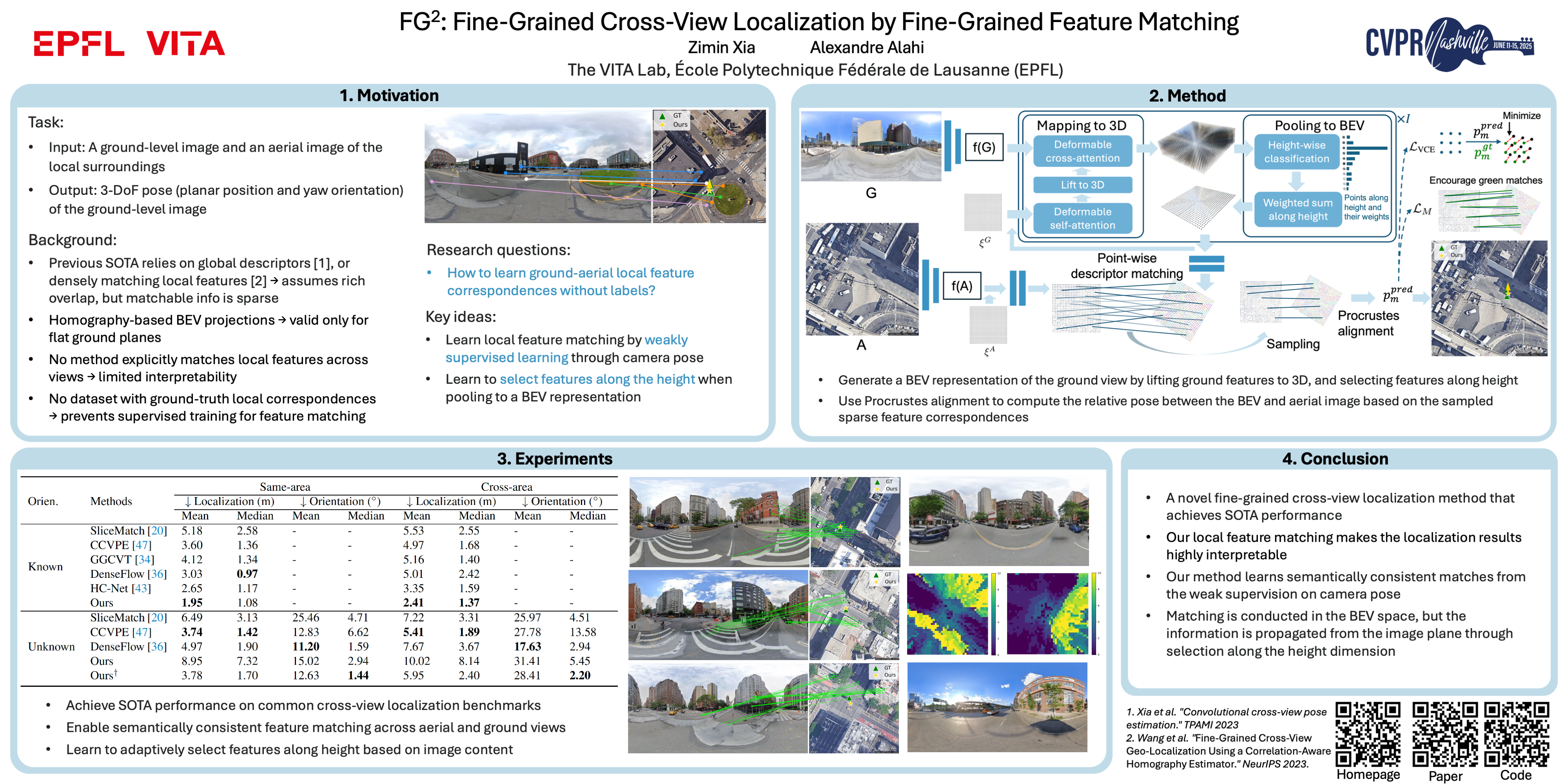
We propose a novel fine-grained cross-view localization method that estimates the 3 Degrees of Freedom pose of a ground-level image in an aerial image of the surroundings by matching fine-grained features between the two images. The pose is estimated by aligning a point plane generated from the ground image with a point plane sampled from the aerial image. To generate the ground points, we first map ground image features to a 3D point cloud. Our method then learns to select features along the height dimension to pool the 3D points to a Bird's-Eye-View (BEV) plane. This selection enables us to trace which feature in the ground image contributes to the BEV representation. Next, we sample a set of sparse matches from computed point correspondences between the two point planes and compute their relative pose using Procrustes alignment. Compared to the previous state-of-the-art, our method reduces the mean localization error by 42% on the VIGOR dataset. Qualitative results show that our method learns semantically consistent matches across ground and aerial views through weakly supervised learning from the ground truth camera pose.