Uncertainty-Instructed Structure Injection for Generalizable HD Map Construction
{kind=link}
Abstract
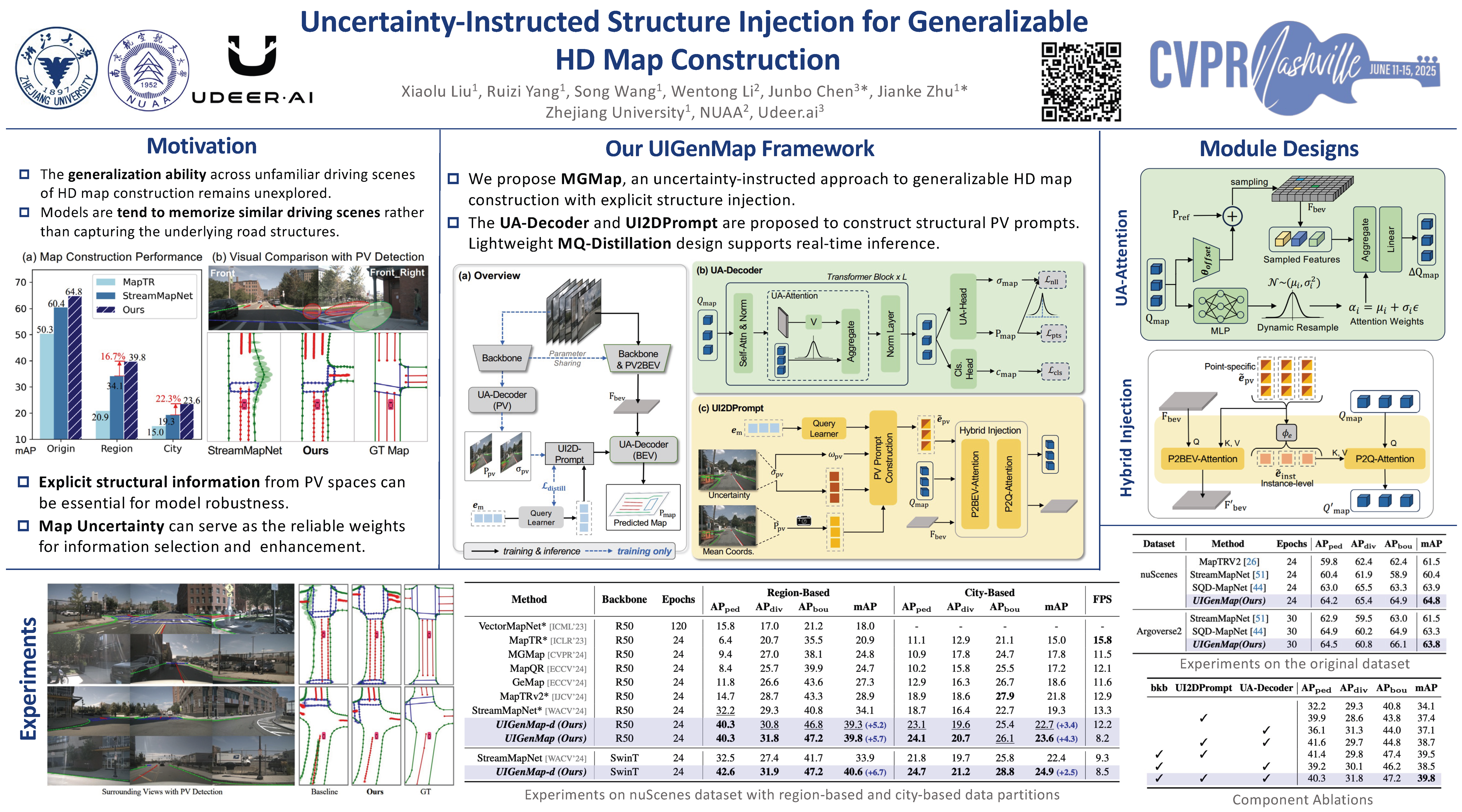
Reliable high-definition (HD) map construction is crucial for the driving safety of autonomous vehicles. While recent studies demonstrate improved performance, their generalization capability across unfamiliar driving scenes remains unexplored. To tackle this issue, we propose \textbf{\textit{UIGenMap}}, an uncertainty-instructed structure injection approach for generalizable HD map vectorization, which concerns the uncertainty resampling in statistical distribution and employs explicit instance features to reduce the excessive reliance on training data. Specifically, we introduce the perspective-view (PV) detection branch to obtain explicit structural features, in which the uncertainty-aware decoder is designed to dynamically sample probability distributions considering the difference in scenes. With probabilistic embedding and selection, UI2DPrompt is proposed to construct PV learnable prompts. These PV prompts are integrated into the map decoder by designed hybrid injection to compensate for neglected instance structures. To ensure real-time inference, a lightweight Mimic Query Distillation is designed to learn from PV prompts, which can serve as an efficient alternative to the flow of PV branches. Extensive experiments on challenging geographically disjoint (geo-based) data splits demonstrate that our UIGenMap achieves superior performance, with +5.7 mAP improvement on nuScenes dataset. Our code will be made publicly available.