POT: Prototypical Optimal Transport for Weakly Supervised Semantic Segmentation
{kind=link}
Abstract
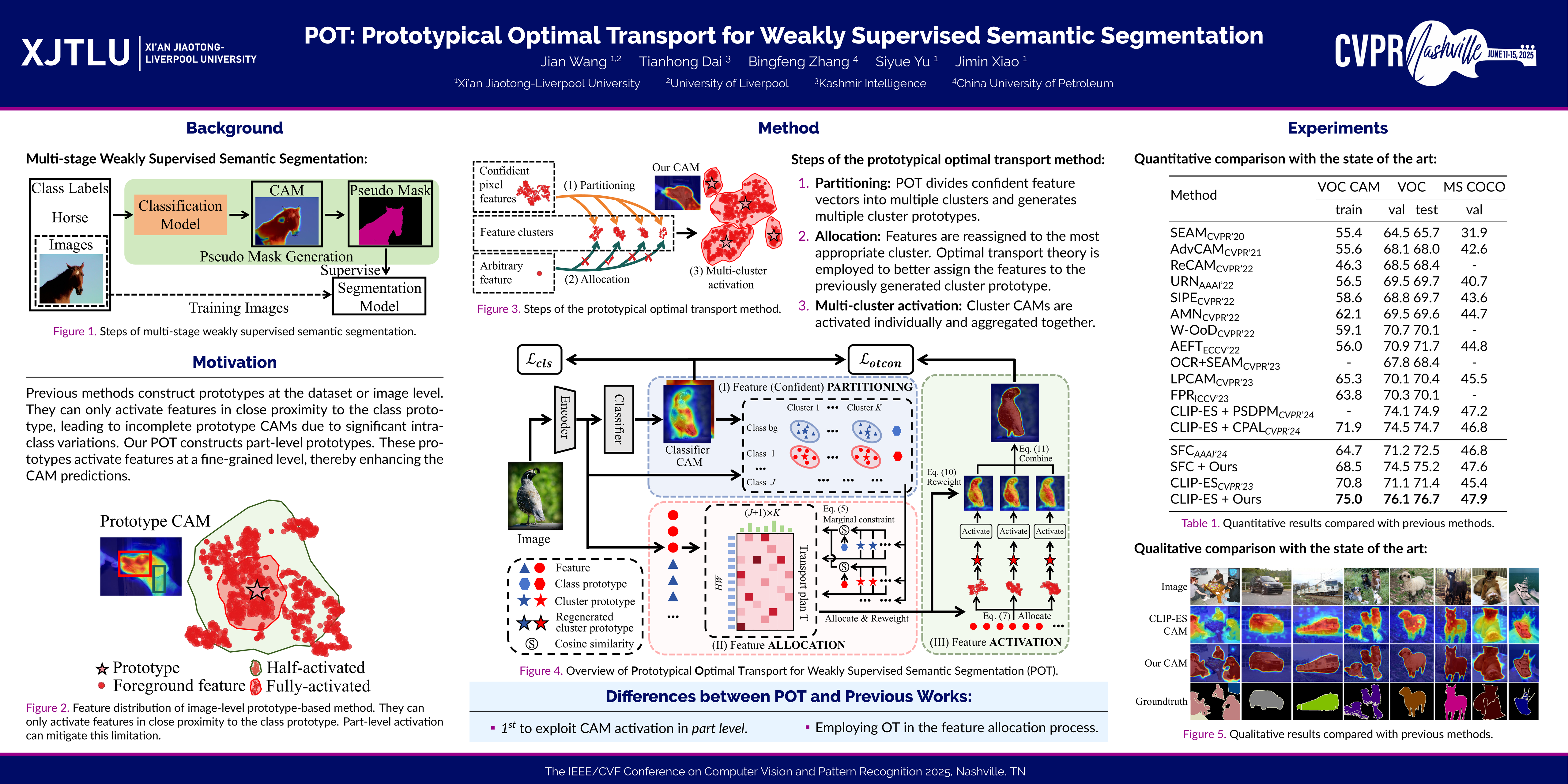
Weakly Supervised Semantic Segmentation (WSSS) leverages Class Activation Maps (CAMs) to extract spatial information from image-level labels. However, CAMs primarily highlight the most discriminative foreground regions, leading to incomplete results. Prototype-based methods attempt to address this limitation by employing prototype CAMs instead of classifier CAMs. Nevertheless, existing prototype-based methods typically use a single prototype for each class, which is insufficient to capture all attributes of the foreground features due to the significant intra-class variations across different images. Consequently, these methods still struggle with incomplete CAM predictions. In this paper, we propose a novel framework called Prototypical Optimal Transport (POT) for WSSS. POT enhances CAM predictions by dividing features into multiple clusters and activating them separately using multiple cluster prototypes. In this process, a similarity-aware optimal transport is employed to assign features to the most probable clusters. This similarity-aware strategy ensures the prioritization of significant cluster prototypes, thereby improving the accuracy of feature assignment. Additionally, we introduce an adaptive OT-based consistency loss to refine feature representations. This framework effectively overcomes the limitations of single-prototype methods, providing more complete and accurate CAM predictions. Extensive experimental results on standard WSSS benchmarks (PASCAL VOC and MS COCO) demonstrate that our method significantly improves the quality of CAMs and achieves state-of-the-art performances. The source code will be released.