RCP-Bench: Benchmarking Robustness for Collaborative Perception Under Diverse Corruptions
{kind=link}
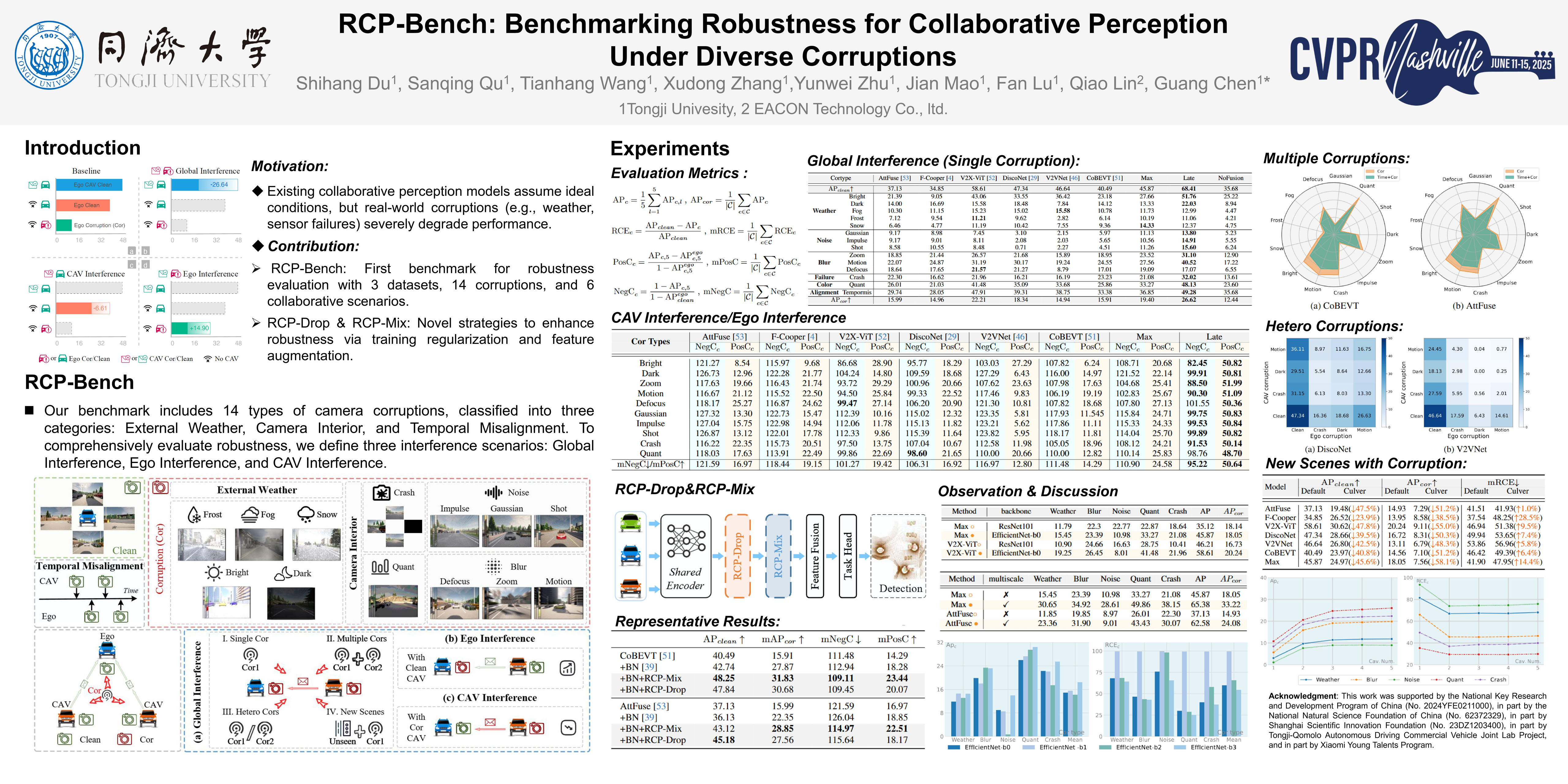
Abstract
Collaborative perception enhances single-vehicle perception by integrating sensory data from multiple connected vehicles. However, existing studies often assume ideal conditions, overlooking resilience to real-world challenges, such as adverse weather and sensor malfunctions, which is critical for safe deployment. To address this gap, we introduce RCP-Bench, the first comprehensive benchmark designed to evaluate the robustness of collaborative detection models under a wide range of real-world corruptions. RCPBench includes three new datasets (i.e., OPV2V-C, V2XSet-C, and DAIR-V2X-C) that simulate six collaborative cases and 14 types of camera corruption resulting from external environmental factors, sensor failures, and temporal misalignments. Extensive experiments on 10 leading collaborative perception models reveal that, while these models perform well under ideal conditions, they are significantly affected by corruptions. To improve robustness, we propose two simple yet effective strategies, RCP-Drop and RCP-Mix, based on training regularization and feature augmentation. Additionally, we identify several critical factors influencing robustness, such as backbone architecture, camera number, feature fusion methods, and the number of connected vehicles. We hope that RCP-Bench, along with these strategies and insights, will stimulate future research toward developing more robust collaborative perception models. Our benchmark toolkit will be made public.