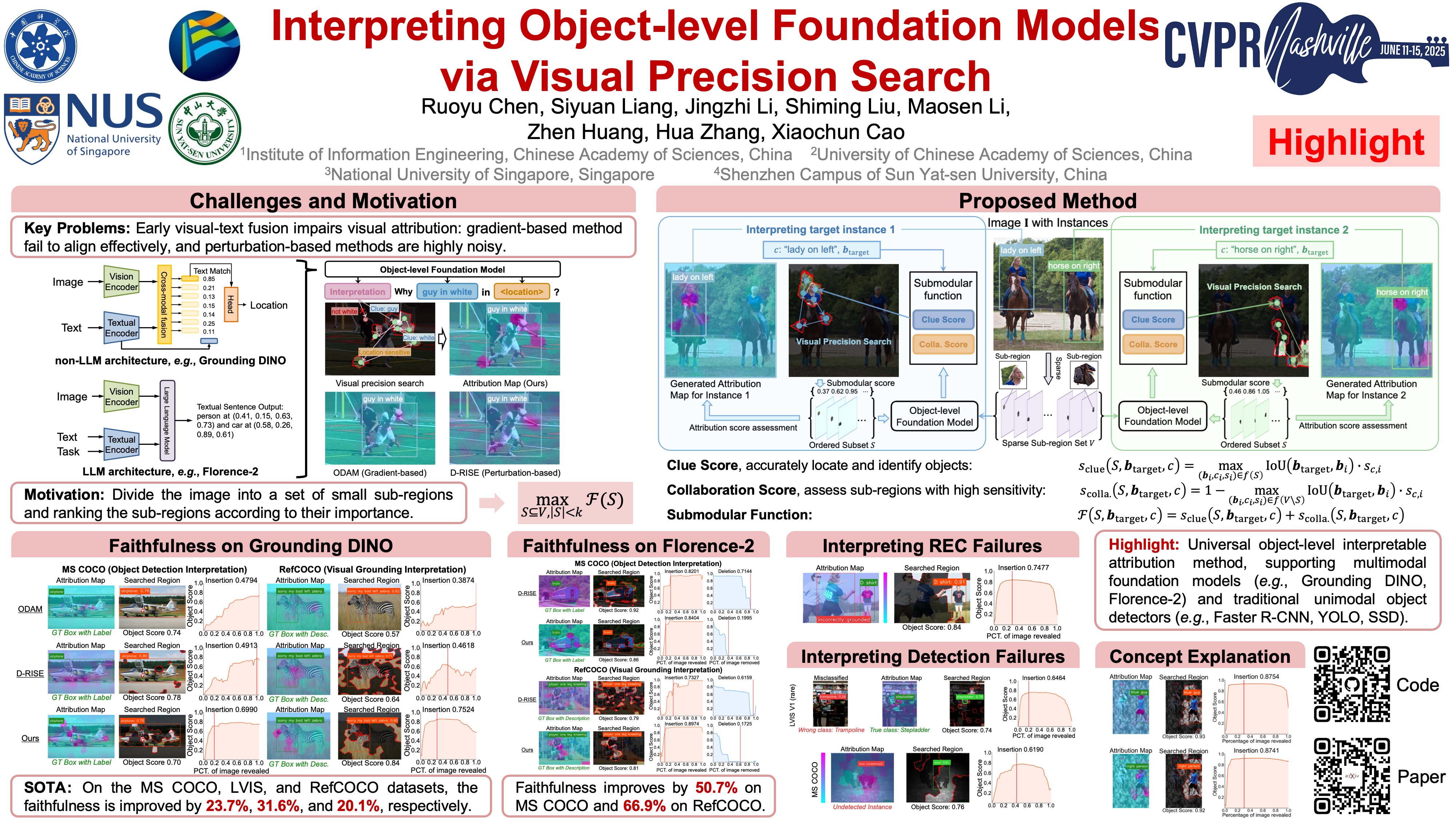
Interpreting Object-level Foundation Models via Visual Precision Search
 Highlight
Highlight
{kind=link}
Abstract
Advances in multimodal pre-training have propelled object-level foundation models, such as Grounding DINO and Florence-2, in tasks like visual grounding and object detection. However, interpreting these models’ decisions has grown increasingly challenging. Existing interpretable attribution methods for object-level task interpretation have notable limitations: (1) gradient-based methods lack precise localization due to visual-textual fusion in foundation models, and (2) perturbation-based methods produce noisy saliency maps, limiting fine-grained interpretability. To address these, we propose a Visual Precision Search method that generates accurate attribution maps with fewer regions. Our method bypasses internal model parameters to overcome attribution issues from multimodal fusion, dividing inputs into sparse sub-regions and using consistency and collaboration scores to accurately identify critical decision-making regions. We also conducted a theoretical analysis of the boundary guarantees and scope of applicability of our method. Experiments on RefCOCO, MS COCO, and LVIS show our approach enhances object-level task interpretability over SOTA for Grounding DINO and Florence-2 across various evaluation metrics, with faithfulness gains of 23.7\%, 31.6\%, and 20.1\% on MS COCO, LVIS, and RefCOCO for Grounding DINO, and 102.9\% and 66.9\% on MS COCO and RefCOCO for Florence-2. Additionally, our method can interpret failures in visual grounding and object detection tasks, surpassing existing methods across multiple evaluation metrics.