Enduring, Efficient and Robust Trajectory Prediction Attack in Autonomous Driving via Optimization-Driven Multi-Frame Perturbation Framework
 Highlight
Highlight
{kind=link}
Abstract
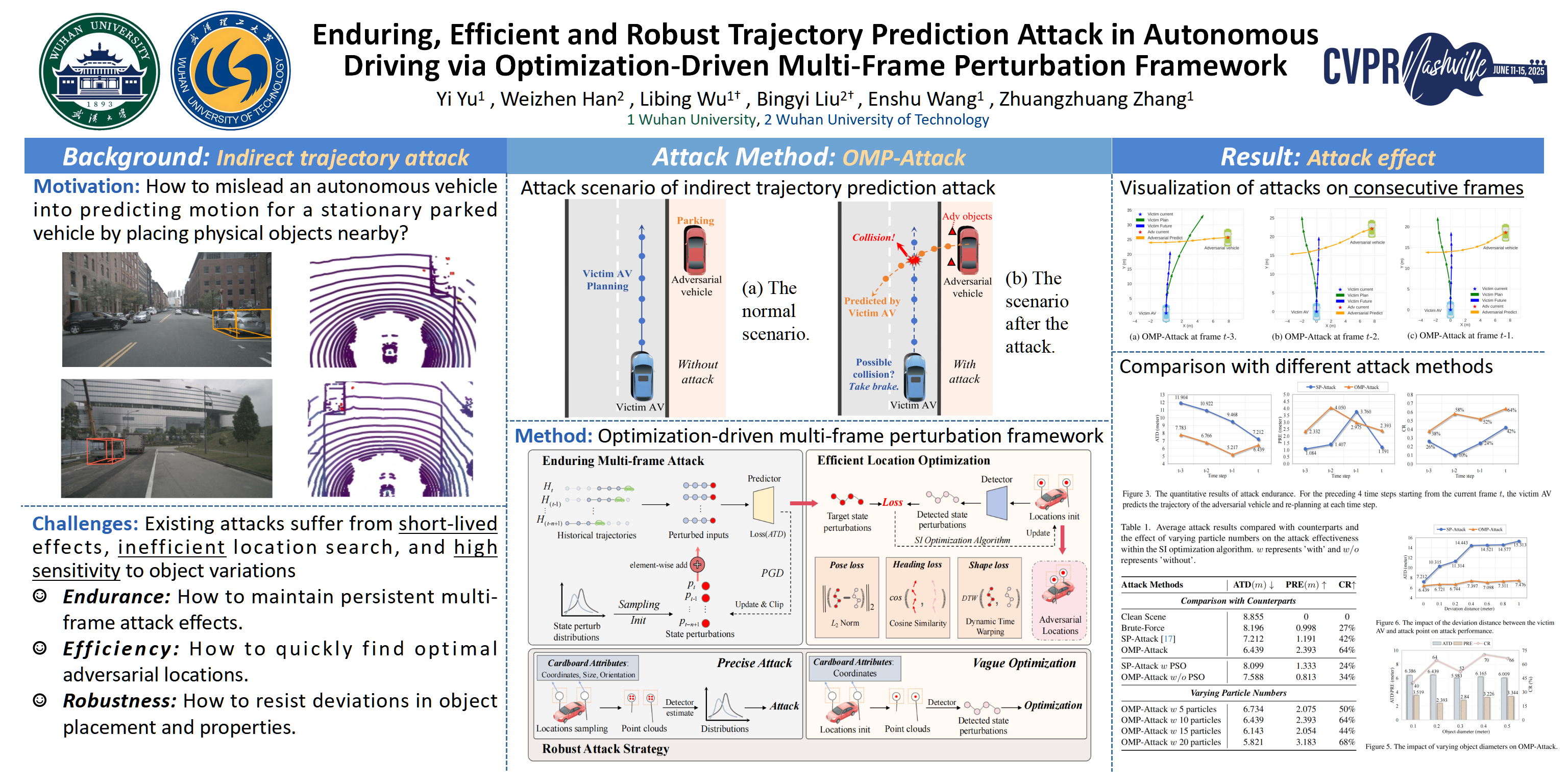
Trajectory prediction plays a crucial role in autonomous driving systems, and exploring its vulnerability has garnered widespread attention. However, existing trajectory prediction attack methods often rely on single-point attacks to make efficient perturbations. This limits their applications in real-world scenarios due to the transient nature of single-point attacks, their susceptibility to filtration, and the uncertainty regarding the deployment environment. To address these challenges, this paper proposes a novel LiDAR-induced attack framework to impose multi-frame attacks by optimization-driven adversarial location search, achieving endurance, efficiency, and robustness. This framework strategically places objects near the adversarial vehicle to implement an attack and introduces three key innovations. First, successive state perturbations are generated using a multi-frame single-point attack strategy, effectively misleading trajectory predictions over extended time horizons. Second, we efficiently optimize adversarial objects' locations through three specialized loss functions to achieve desired perturbations. Lastly, we improve robustness by treating the adversarial object as a point without size constraints during the location search phase and reduce dependence on both the specific attack point and the adversarial object's properties. Extensive experiments confirm the superior performance and robustness of our framework.