LightLoc: Learning Outdoor LiDAR Localization at Light Speed
{kind=link}
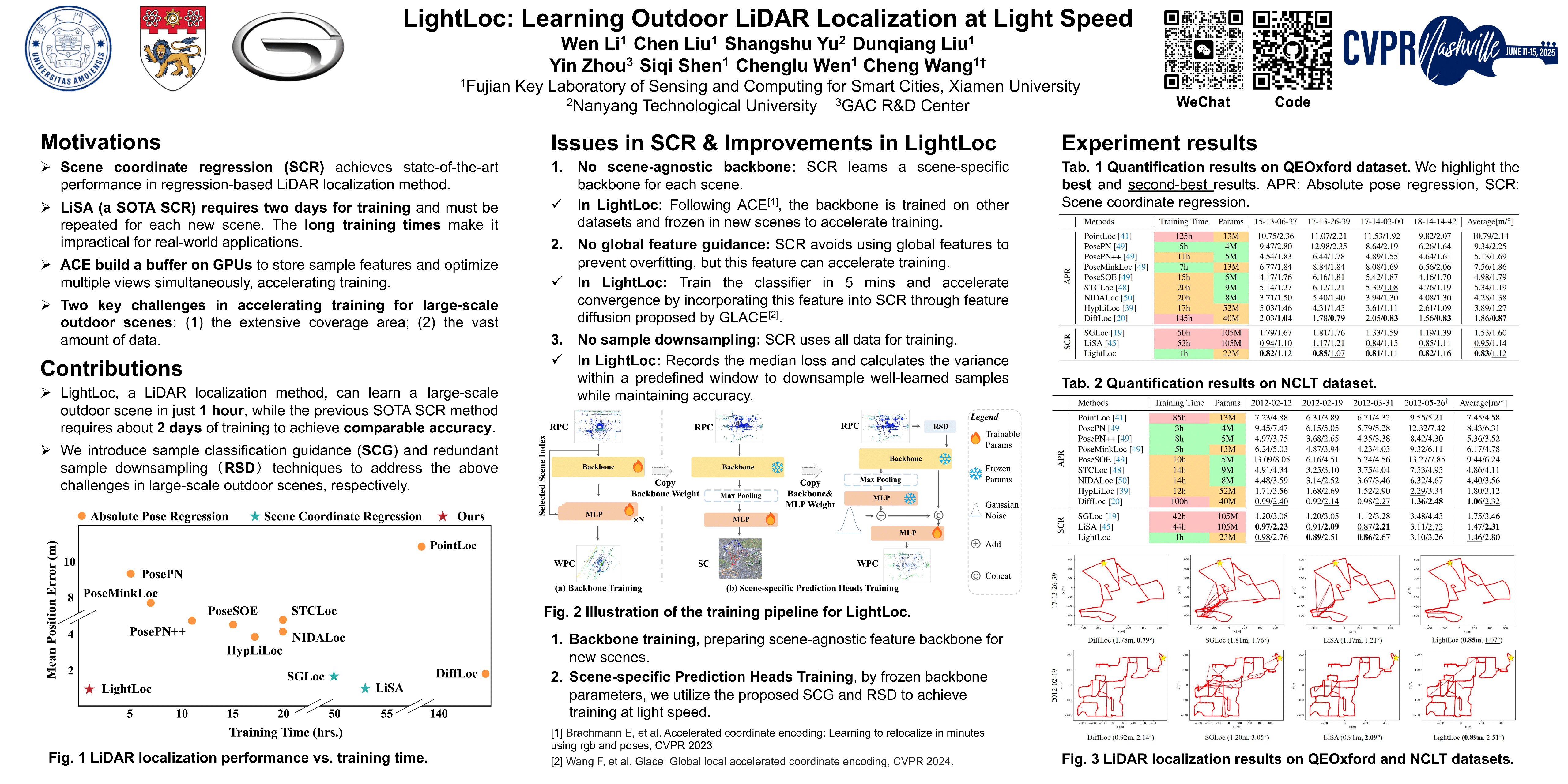
Abstract
Scene Coordinate Regression (SCR) achieves impressive results in outdoor LiDAR localization but requires days of training. Since training needs to be repeated for each new scene, long training times make these methods impractical for applications requiring time-sensitive system upgrades, such as autonomous driving, drones, robotics, etc. We identify large coverage areas and vast amounts of data in large-scale outdoor scenes as key challenges that limit fast training. In this paper, we propose LightLoc, the first method capable of efficiently learning localization in a new scene at light speed. Beyond freezing the scene-agnostic feature backbone and training only the scene-specific prediction heads, we introduce two novel techniques to address these challenges. First, we introduce sample classification guidance to assist regression learning, reducing ambiguity from similar samples and improving training efficiency. Second, we propose a redundant sample downsampling technique to remove well-learned frames during training, reducing training time without compromising accuracy. In addition, the fast training and confidence estimation characteristics of sample classification enable its integration into SLAM, effectively eliminating error accumulation. Extensive experiments on large-scale outdoor datasets demonstrate that LightLoc achieves state-of-the-art performance with just 1 hour of training—50× faster than existing methods. Our code will be made available upon acceptance.