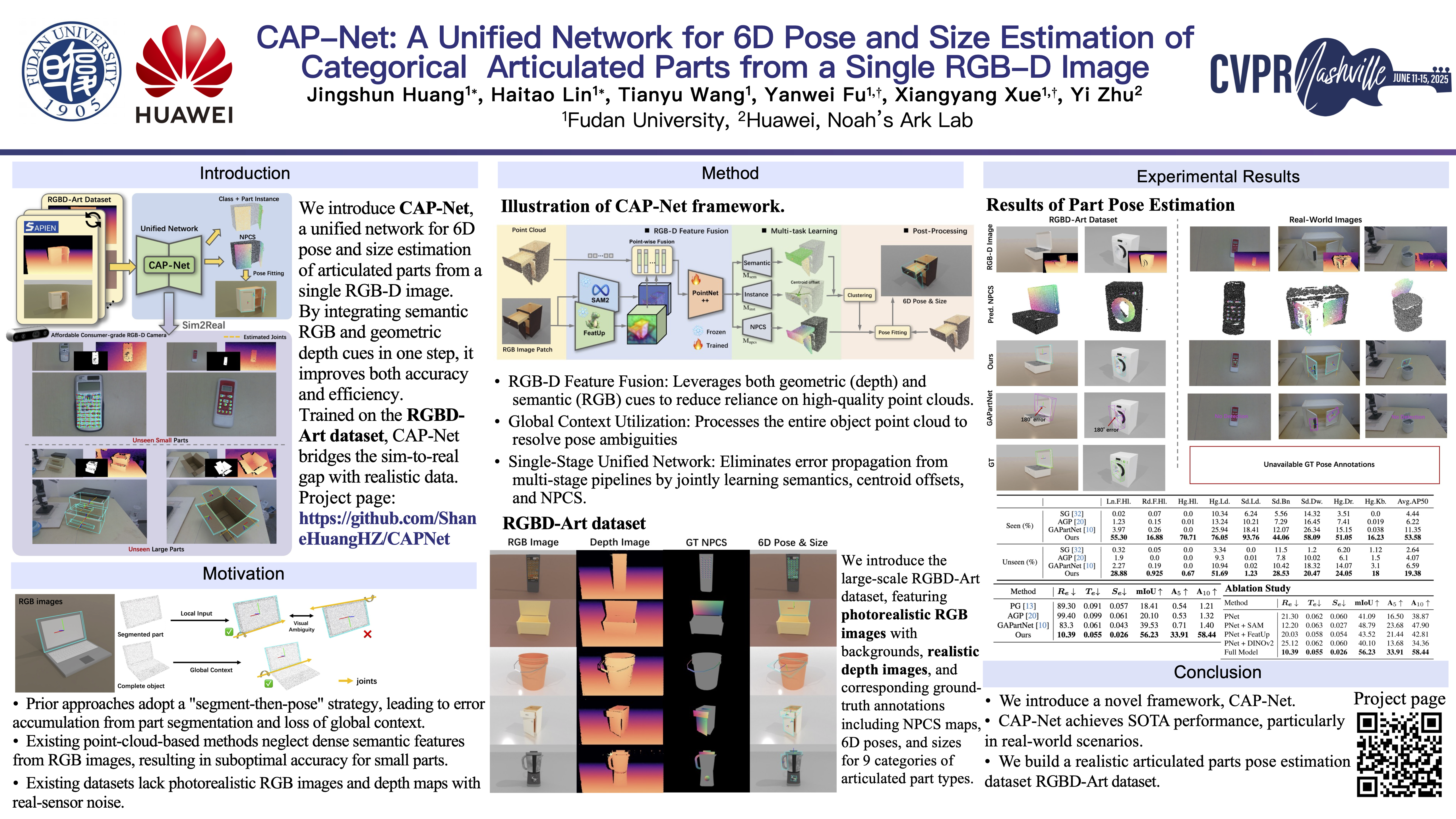
CAP-Net: A Unified Network for 6D Pose and Size Estimation of Categorical Articulated Parts from a Single RGB-D Image
 Highlight
Highlight
{kind=link}
Abstract
This paper tackles category-level pose estimation of articulated objects in robotic manipulation tasks and introduces a new benchmark dataset. While recent methods estimate part poses and sizes at the category level, they often rely on geometric cues and complex multi-stage pipelines that first segment parts from the point cloud, followed by Normalized Part Coordinate Space (NPCS) estimation for 6D poses. These approaches overlook dense semantic cues from RGB images, leading to suboptimal accuracy, particularly for objects with small parts. To address these limitations, we propose a single-stage Network, CAP-Net, for estimating the 6D poses and sizes of Categorical Articulated Parts. This method combines RGB-D features to generate instance segmentation and NPCS representations for each part in an end-to-end manner. CAP-Net uses a unified network to simultaneously predict point-wise class labels, centroid offsets, and NPCS maps. A clustering algorithm then groups points of the same predicted class based on their estimated centroid distances to isolate each part. Finally, the NPCS region of each part is aligned with the point cloud to recover its final pose and size.To bridge the sim-to-real domain gap, we introduce the RGBD-Art dataset, the largest RGB-D articulated dataset to date, featuring photorealistic RGB images and depth noise simulated from real sensors. Experimental evaluations on the RGBD-Art dataset demonstrate that our method significantly outperforms the state-of-the-art approach. Real-world deployments of our model in robotic tasks underscore its robustness and exceptional sim-to-real transfer capabilities, confirming its substantial practical utility.