EquiPose: Exploiting Permutation Equivariance for Relative Camera Pose Estimation
{kind=link}
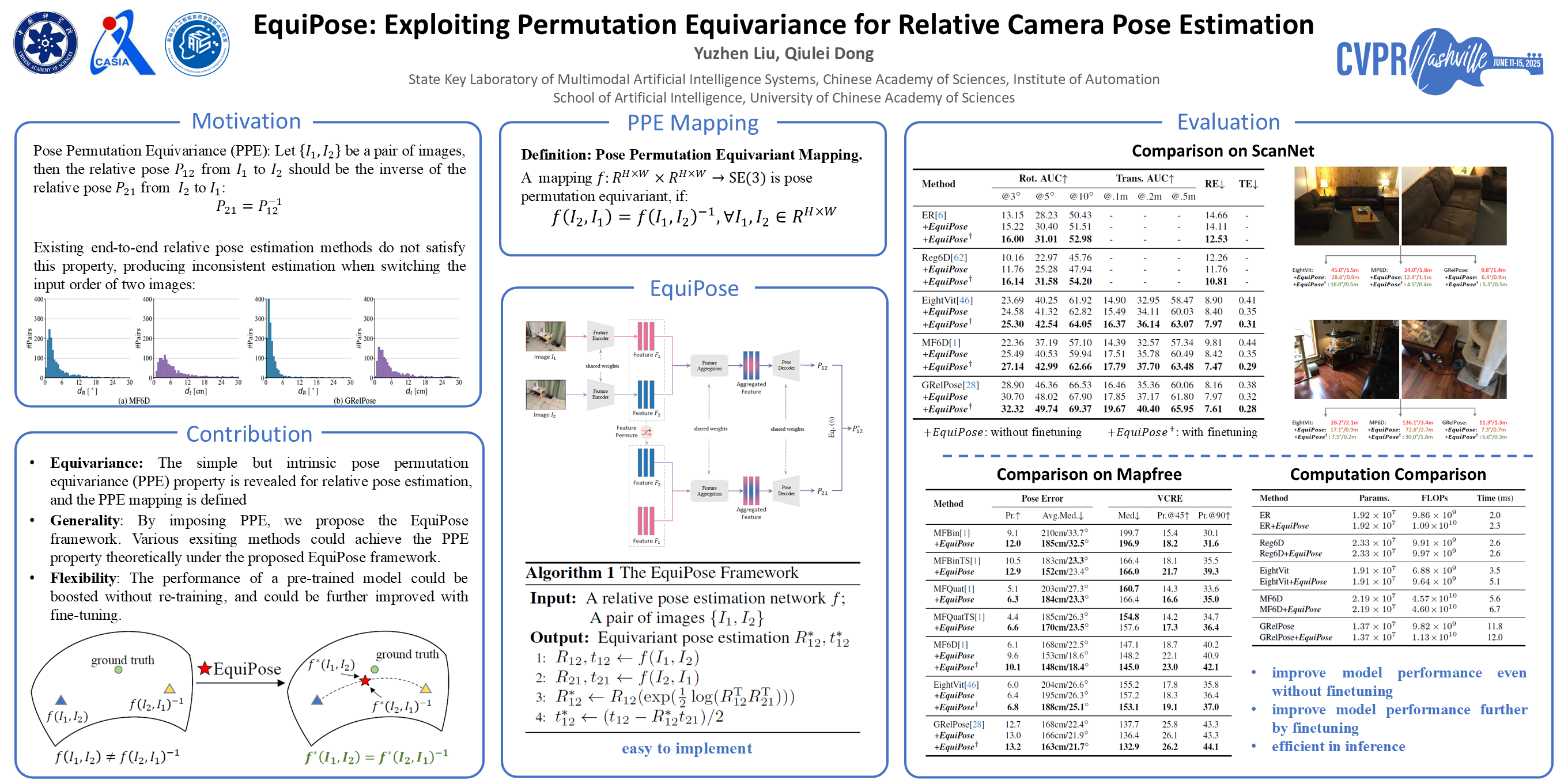
Abstract
Relative camera pose estimation between two images is a fundamental task in 3D computer vision. Recently, many relative pose estimation networks have been explored for learning a mapping from two input images to their corresponding relative pose, however, the estimated relative poses by these methods do not have the intrinsic Pose Permutation Equivariance (PPE) property: the estimated relative pose from Image A to Image B should be the inverse of that from Image B to Image A. It means that permuting the input order of two images would cause these methods to obtain inconsistent relative poses. To address this problem, we firstly introduce the concept of PPE mapping, which indicates such a mapping that captures the intrinsic PPE property of relative poses. Then by enforcing the aforementioned PPE property, we propose a general framework for relative pose estimation, called EquiPose, which could easily accommodate various relative pose estimation networks in literature as its baseline models. We further theoretically prove that the proposed EquiPose framework could guarantee that its obtained mapping is a PPE mapping. Given a pre-trained baseline model, the proposed EquiPose framework could improve its performance even without fine-tuning, and could further boost its performance with fine-tuning. Experimental results on four public datasets demonstrate that EquiPose could significantly improve the performances of various state-of-the-art models.