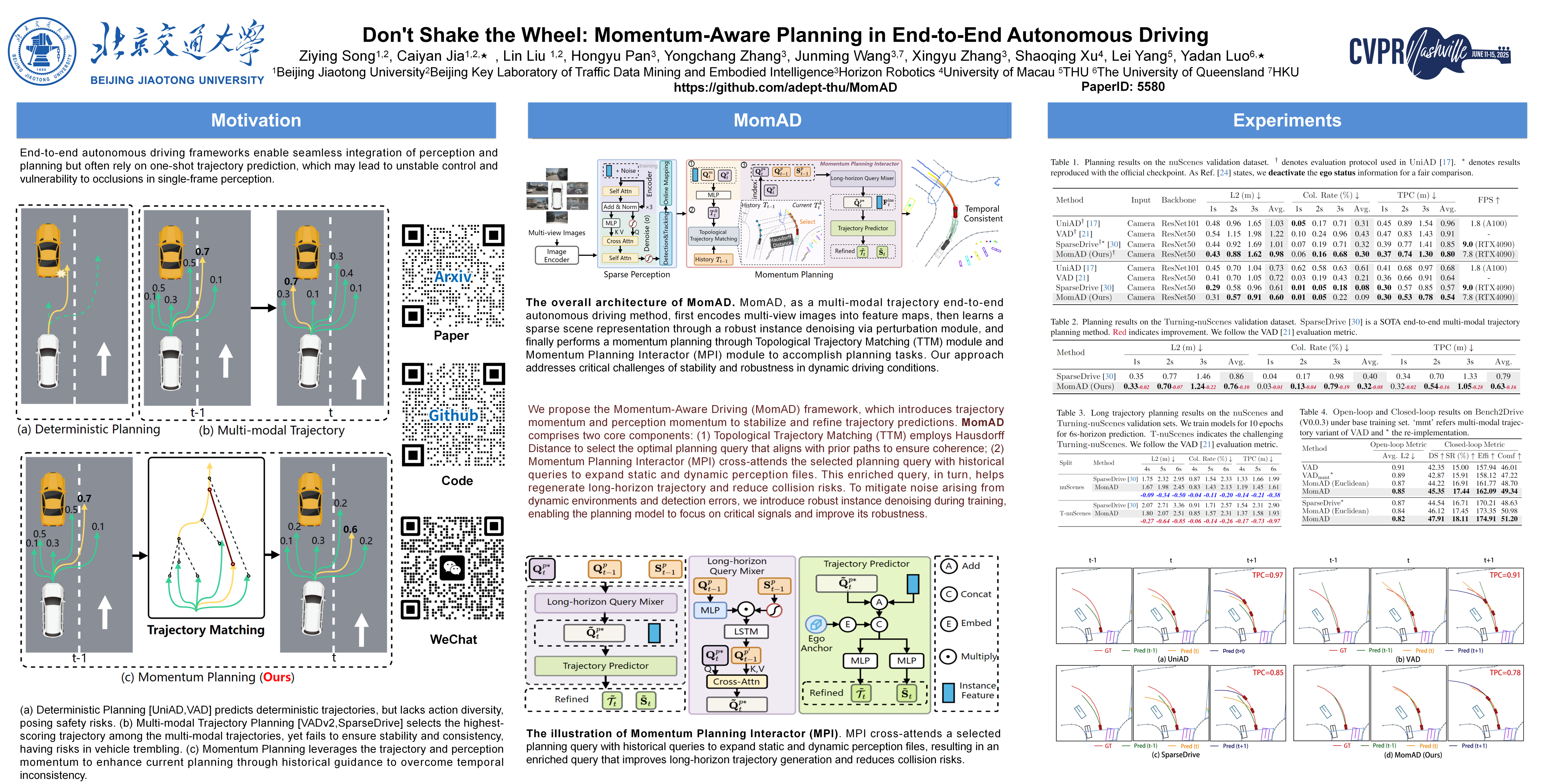
Don't Shake the Wheel: Momentum-Aware Planning in End-to-End Autonomous Driving
Ziying Song ⋅ Caiyan Jia ⋅ Lin Liu ⋅ Hongyu Pan ⋅ Yongchang Zhang ⋅ Junming Wang ⋅ Xingyu Zhang ⋅ Shaoqing Xu ⋅ Lei Yang ⋅ Yadan Luo
2025 Poster
{kind=link}
Abstract
End-to-end autonomous driving frameworks enable seamless integration of perception and planning but often rely on one-shot trajectory prediction, which may lead to unstable control and vulnerability to occlusions in single-frame perception. To address this, we propose the Momentum-Aware Driving (MomAD) framework, which introduces trajectory momentum and perception momentum to stabilize and refine trajectory predictions. MomAD comprises two core components: (1) Topological Trajectory Matching (TTM) employs Hausdorff Distance to select the optimal planning query that aligns with prior paths to ensure coherence; (2) Momentum Planning Interactor (MPI) cross-attends the selected planning query with historical queries to expand static and dynamic perception files. This enriched query, in turn, helps regenerate long-horizon trajectory and reduce collision risks. To mitigate noise arising from dynamic environments and detection errors, we introduce robust instance denosing during training, enabling the planning model to focus on critical signals and improve its robustness. To quantify planning stability, we introduce a novel Trajectory Prediction Consistency (TPC) metric. Experiments on the nuScenes dataset demonstrate that MomAD achieves superior long-term consistency ($\geq 3s$) compared to SOTA methods. Furthermore, we curate a Turning-nuScenes validation set to evaluate model performance in challenging turning scenarios, where MomAD reduces the collision rate by 26\% and TPC by 0.97m (33.45\%) compared to baselines over a 6s prediction horizon. These results highlight MomAD’s enhanced stability, robustness, and responsiveness in dynamic driving conditions.
Chat is not available.
Successful Page Load