Hyperbolic Uncertainty-Aware Few-Shot Incremental Point Cloud Segmentation
{kind=link}
Abstract
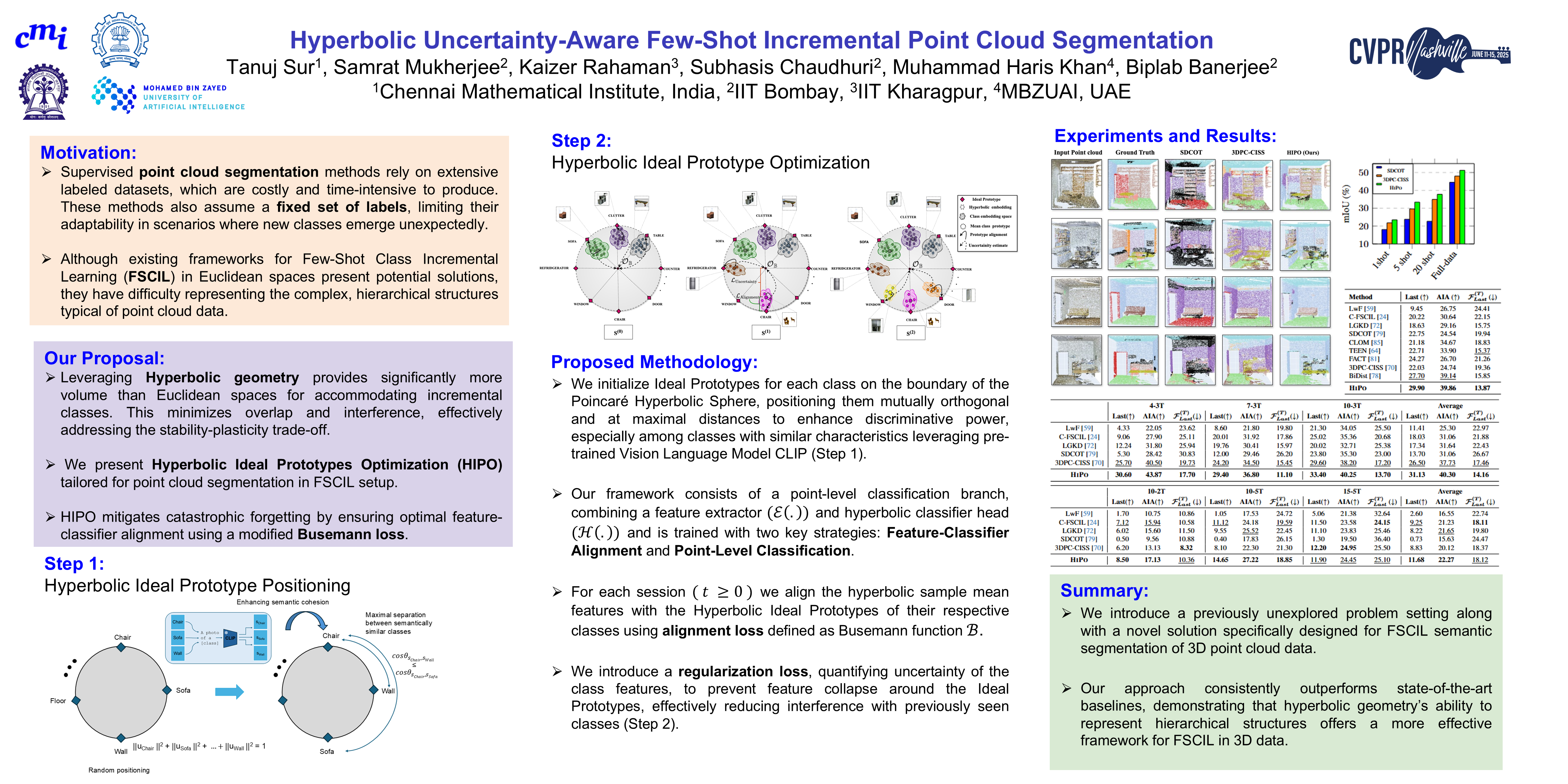
3D point cloud segmentation is essential across a range of applications; however, conventional methods often struggle in evolving environments, particularly when tasked with identifying novel categories under limited supervision. Few-Shot Learning (FSL) and Class Incremental Learning (CIL) have been adapted previously to address these challenges in isolation, yet the combined paradigm of Few-Shot Class Incremental Learning (FSCIL) remains largely unexplored for point cloud segmentation. To address this gap, we introduce \textbf{Hyperbolic Ideal Prototypes Optimization} (\textsc{HiPo}), a novel framework that harnesses hyperbolic embeddings for FSCIL in 3D point clouds. \textsc{HiPo} employs the Poincaré Hyperbolic Sphere as its embedding space, integrating Ideal Prototypes enriched by CLIP-derived class semantics, to capture the hierarchical structure of 3D data. By enforcing orthogonality among prototypes and maximizing representational margins, \textsc{HiPo} constructs a resilient embedding space that mitigates forgetting and enables the seamless integration of new classes, thereby effectively countering overfitting. Extensive evaluations on S3DIS, ScanNetv2, and cross-dataset scenarios demonstrate \textsc{HiPo}’s strong performance, significantly surpassing existing approaches in both in-domain and cross-dataset FSCIL tasks for 3D point cloud segmentation. \textbf{Code will be released upon acceptance.}