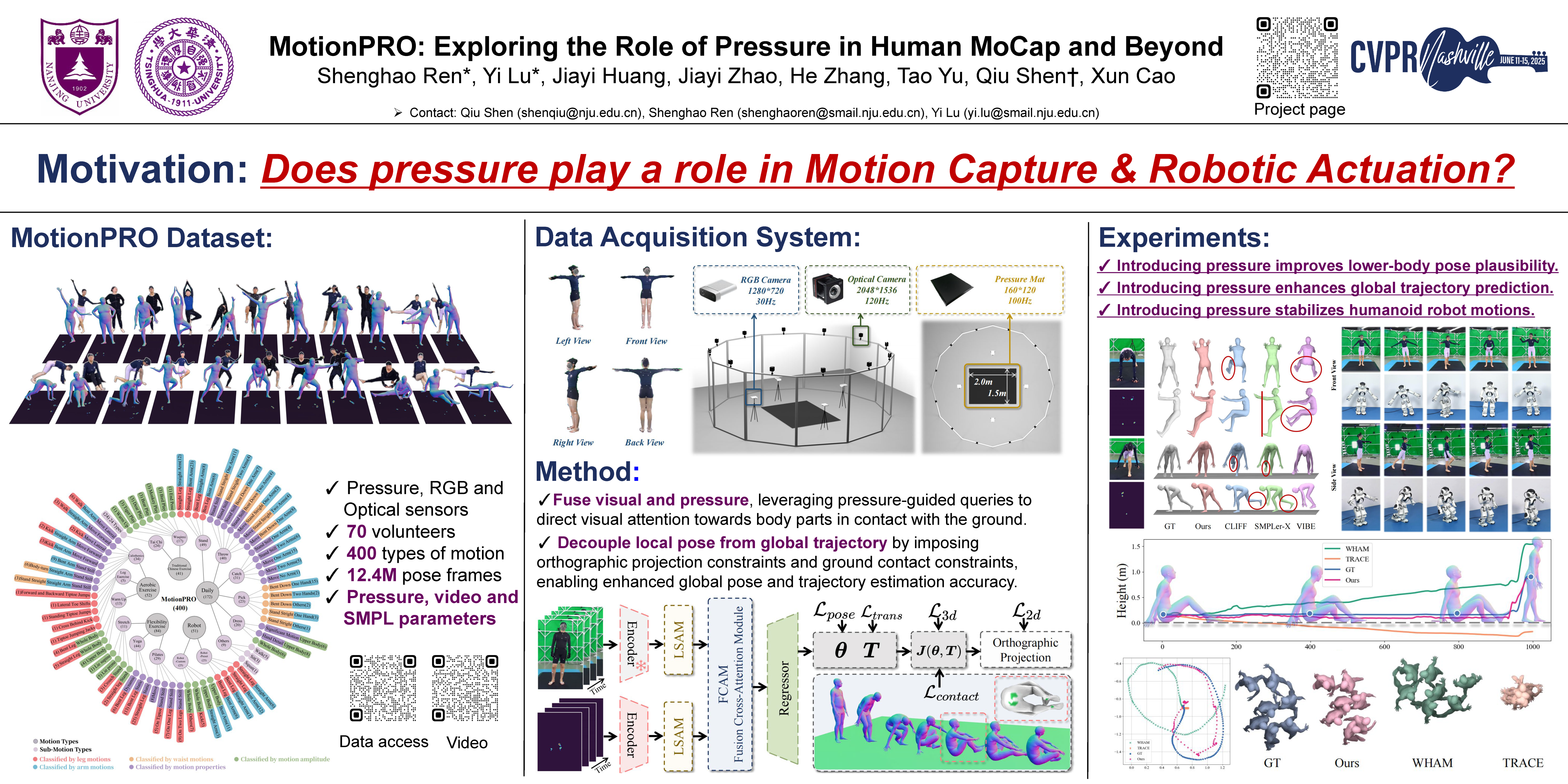
MotionPRO: Exploring the Role of Pressure in Human MoCap and Beyond
 Highlight
Highlight
{kind=link}
Abstract
Existing human Motion Capture (MoCap) method mostly focus on the visual similarity while neglecting the physical plausibility. As a result, downstream tasks such as driving virtual human in 3D scene or humanoid robots in real world suffer from issues such as timing drift and jitter, spatial problems like sliding and penetration, and poor global trajectory accuracy. In this paper, we revisit human MoCap from the perspective of interaction between human body and physical world by exploring the role of pressure. Firstly, we construct a large-scale Human Motion capture dataset with Pressure, RGB and Optical sensors (named MotionPRO), which comprises 70 volunteers performing 400 types of motion. Secondly, we examine both the necessity and effectiveness of the pressure signal through two challenging tasks: (1) pose and trajectory estimation based solely on pressure: We propose a network that incorporates a small-kernel decoder and a long-short-term attention module, and proof that pressure could provide accurate global trajectory and plausible lower body pose. (2) pose and trajectory estimation by fusing pressure and RGB: We impose constraints on orthographic similarity along the camera axis and whole-body contact along the vertical axis to enhance the cross-attention strategy for fusing pressure and RGB feature maps. Experiments demonstrate that fusing pressure with RGB features not only significantly improves performance in terms of objective metrics but also plausibly drives virtual humans (SMPL) in 3D scene. Furthermore, we demonstrate that incorporating physical perception enables humanoid robots to perform more precise and stable actions, which is highly beneficial for the development of embodied artificial intelligence.