MNE-SLAM: Multi-Agent Neural SLAM for Mobile Robots
{kind=link}
Abstract
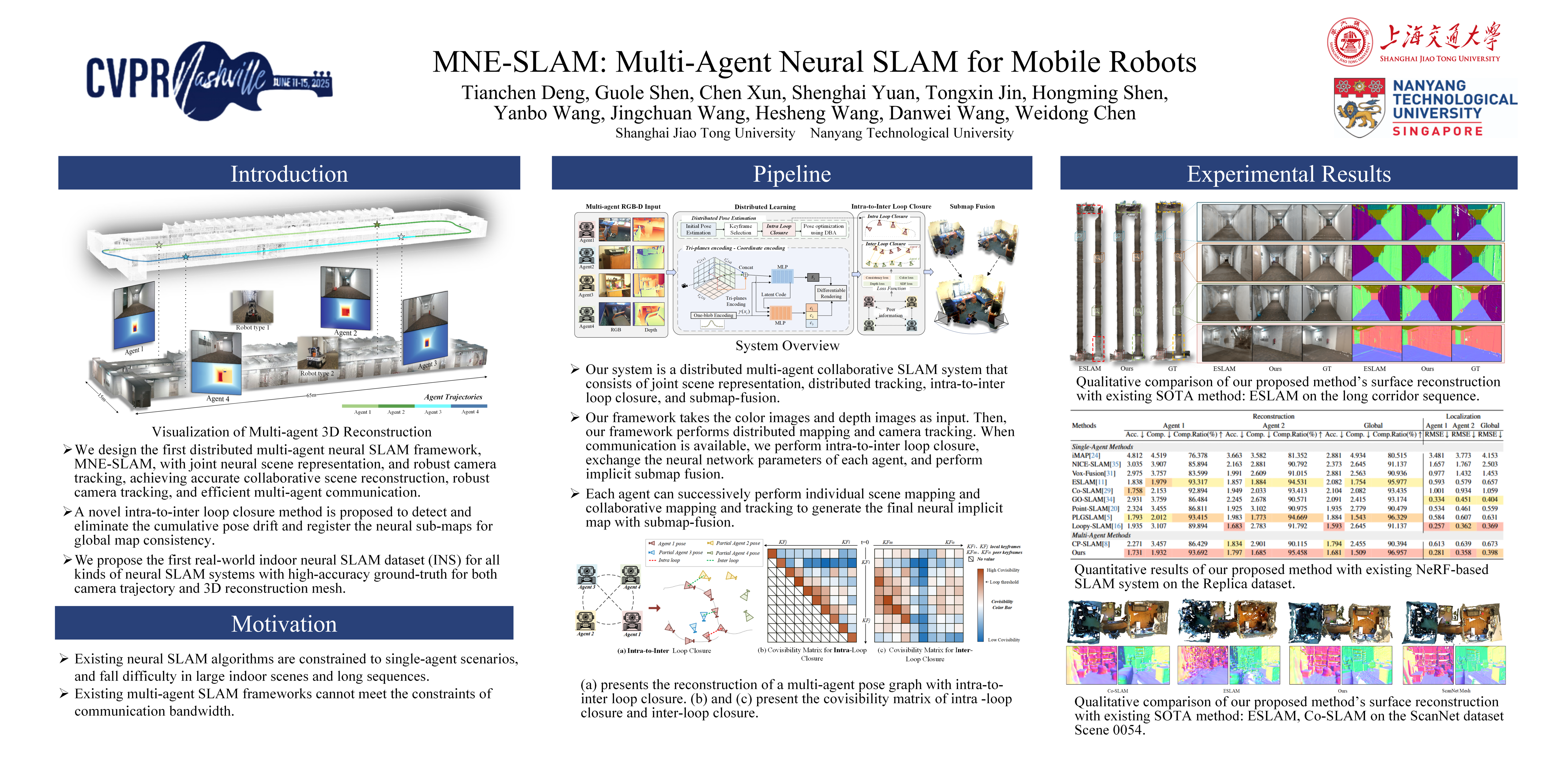
Neural implicit scene representations have recently shown promising results in dense visual SLAM. However, existing implicit SLAM algorithms are constrained to single-agent scenarios, and fall difficulty in large indoor scenes and long sequences. Existing multi-agent SLAM frameworks cannot meet the constraints of communication bandwidth. To this end, we propose the first distributed multi-agent collaborative SLAM framework with distributed mapping and camera tracking, joint scene representation, intra-to-inter loop closure, and multi-submap fusion. Specifically, our proposed distributed neural mapping and tracking framework only needs peer-to-peer communication, which can greatly improve multi-agent cooperation and communication efficiency. A novel intra-to-inter loop closure method is designed to achieve local (single-agent) and global (multi-agent) consistency. Furthermore, to the best of our knowledge, there is no real-world dataset for NeRF-based/GS-based SLAM that provides both continuous-time trajectories groundtruth and high-accuracy 3D meshes groundtruth. To this end, we propose the first real-world indoor neural slam (INS) dataset covering both single-agent and multi-agent scenarios, ranging from small room to large-scale scenes, with high-accuracy ground truth for both 3D mesh and continuous-time camera trajectory. This dataset can advance the development of the community. Experiments onvarious datasets demonstrate the superiority of the proposed method in both mapping, tracking, and communication. The dataset and code have been partially open-source on https://anonymous.4open.science/w/ins-BD50/.