MotionTrack: Learning Robust Short-Term and Long-Term Motions for Multi-Object Tracking
{kind=link}
Abstract
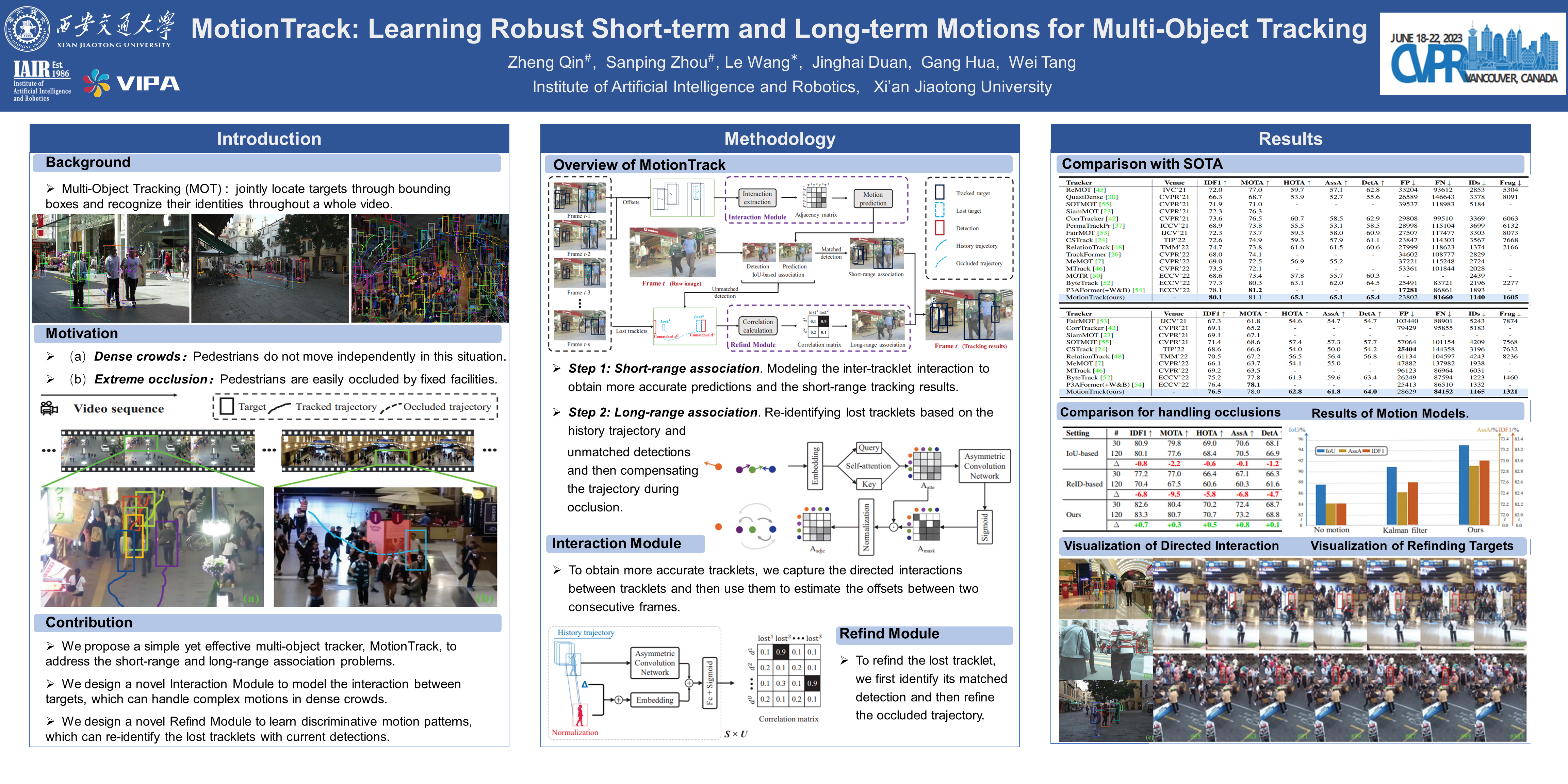
The main challenge of Multi-Object Tracking~(MOT) lies in maintaining a continuous trajectory for each target. Existing methods often learn reliable motion patterns to match the same target between adjacent frames and discriminative appearance features to re-identify the lost targets after a long period. However, the reliability of motion prediction and the discriminability of appearances can be easily hurt by dense crowds and extreme occlusions in the tracking process. In this paper, we propose a simple yet effective multi-object tracker, i.e., MotionTrack, which learns robust short-term and long-term motions in a unified framework to associate trajectories from a short to long range. For dense crowds, we design a novel Interaction Module to learn interaction-aware motions from short-term trajectories, which can estimate the complex movement of each target. For extreme occlusions, we build a novel Refind Module to learn reliable long-term motions from the target’s history trajectory, which can link the interrupted trajectory with its corresponding detection. Our Interaction Module and Refind Module are embedded in the well-known tracking-by-detection paradigm, which can work in tandem to maintain superior performance. Extensive experimental results on MOT17 and MOT20 datasets demonstrate the superiority of our approach in challenging scenarios, and it achieves state-of-the-art performances at various MOT metrics. We will make the code and trained models publicly available.