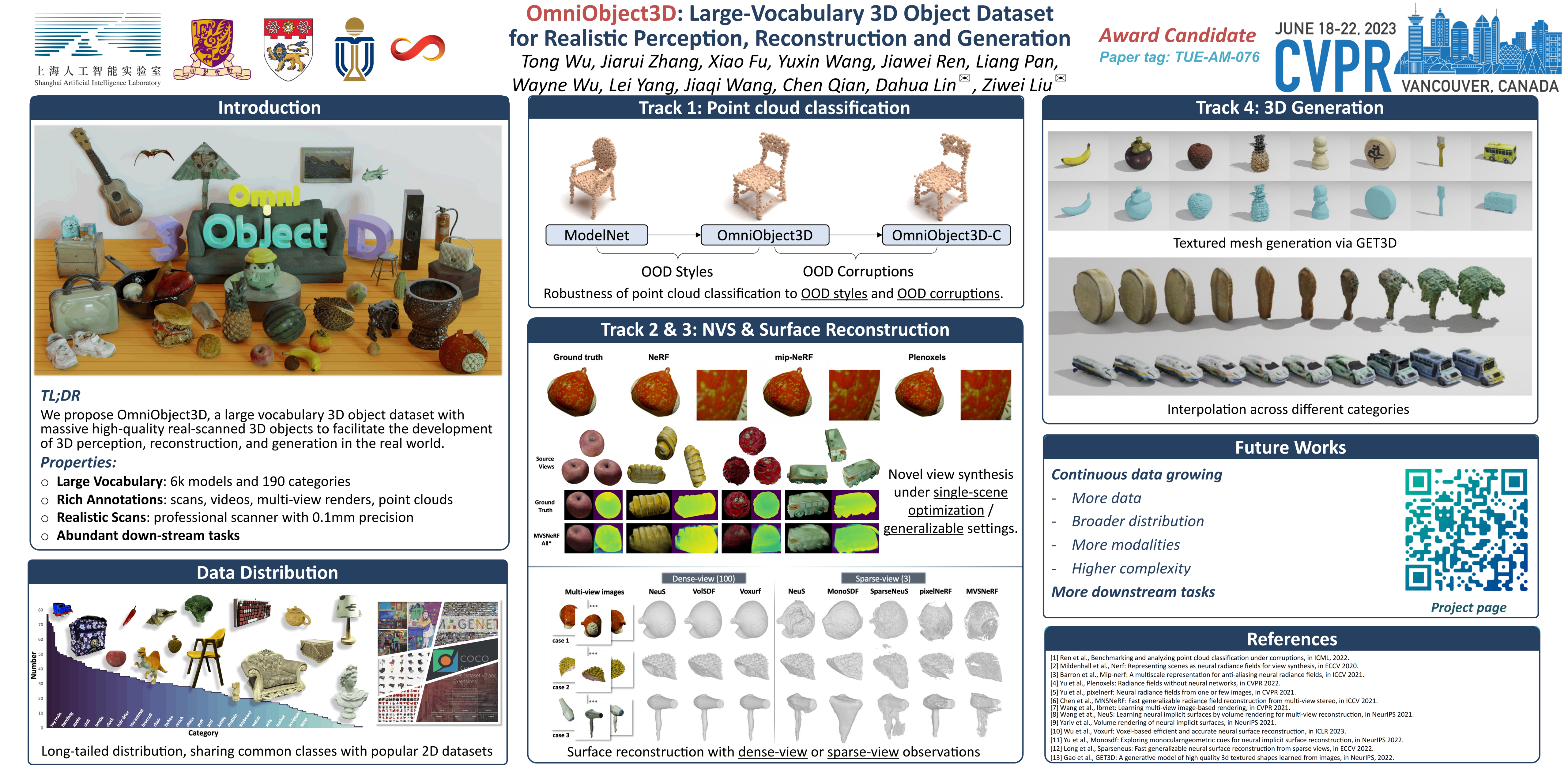
OmniObject3D: Large-Vocabulary 3D Object Dataset for Realistic Perception, Reconstruction and Generation
 Award Candidate
Award Candidate
{kind=link}
Abstract
Recent advances in modeling 3D objects mostly rely on synthetic datasets due to the lack of large-scale real-scanned 3D databases. To facilitate the development of 3D perception, reconstruction, and generation in the real world, we propose OmniObject3D, a large vocabulary 3D object dataset with massive high-quality real-scanned 3D objects. OmniObject3D has several appealing properties: 1) Large Vocabulary: It comprises 6,000 scanned objects in 190 daily categories, sharing common classes with popular 2D datasets (e.g., ImageNet and LVIS), benefiting the pursuit of generalizable 3D representations. 2) Rich Annotations: Each 3D object is captured with both 2D and 3D sensors, providing textured meshes, point clouds, multiview rendered images, and multiple real-captured videos. 3) Realistic Scans: The professional scanners support high-quality object scans with precise shapes and realistic appearances. With the vast exploration space offered by OmniObject3D, we carefully set up four evaluation tracks: a) robust 3D perception, b) novel-view synthesis, c) neural surface reconstruction, and d) 3D object generation. Extensive studies are performed on these four benchmarks, revealing new observations, challenges, and opportunities for future research in realistic 3D vision.