Geometry and Uncertainty-Aware 3D Point Cloud Class-Incremental Semantic Segmentation
{kind=link}
Abstract
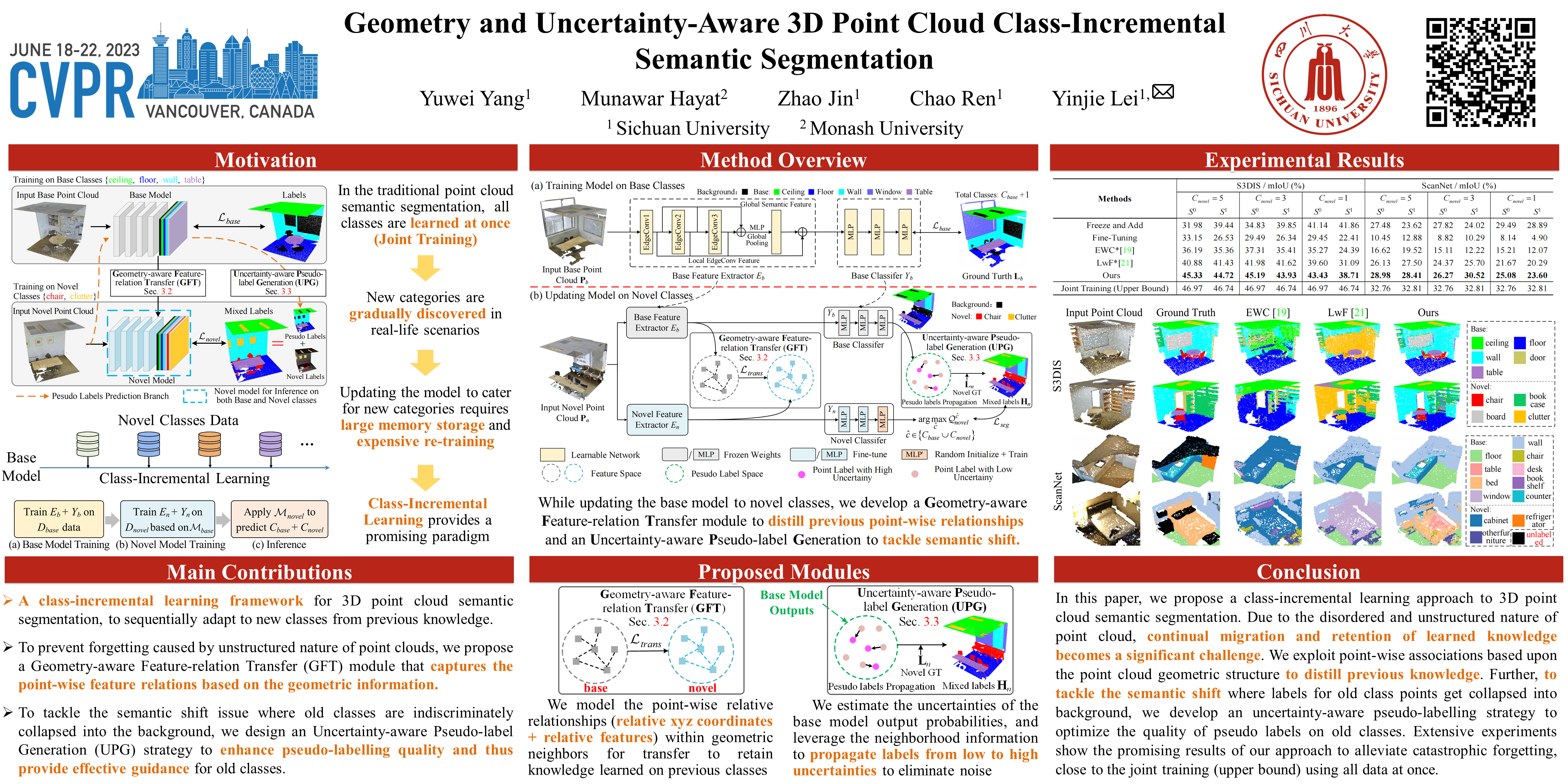
Despite the significant recent progress made on 3D point cloud semantic segmentation, the current methods require training data for all classes at once, and are not suitable for real-life scenarios where new categories are being continuously discovered. Substantial memory storage and expensive re-training is required to update the model to sequentially arriving data for new concepts. In this paper, to continually learn new categories using previous knowledge, we introduce class-incremental semantic segmentation of 3D point cloud. Unlike 2D images, 3D point clouds are disordered and unstructured, making it difficult to store and transfer knowledge especially when the previous data is not available. We further face the challenge of semantic shift, where previous/future classes are indiscriminately collapsed and treated as the background in the current step, causing a dramatic performance drop on past classes. We exploit the structure of point cloud and propose two strategies to address these challenges. First, we design a geometry-aware distillation module that transfers point-wise feature associations in terms of their geometric characteristics. To counter forgetting caused by the semantic shift, we further develop an uncertainty-aware pseudo-labelling scheme that eliminates noise in uncertain pseudo-labels by label propagation within a local neighborhood. Our extensive experiments on S3DIS and ScanNet in a class-incremental setting show impressive results comparable to the joint training strategy (upper bound). Code is available at: https://github.com/leolyj/3DPC-CISS