SemAlign3D: Semantic Correspondence between RGB-Images through Aligning 3D Object-Class Representations
{kind=link}
Abstract
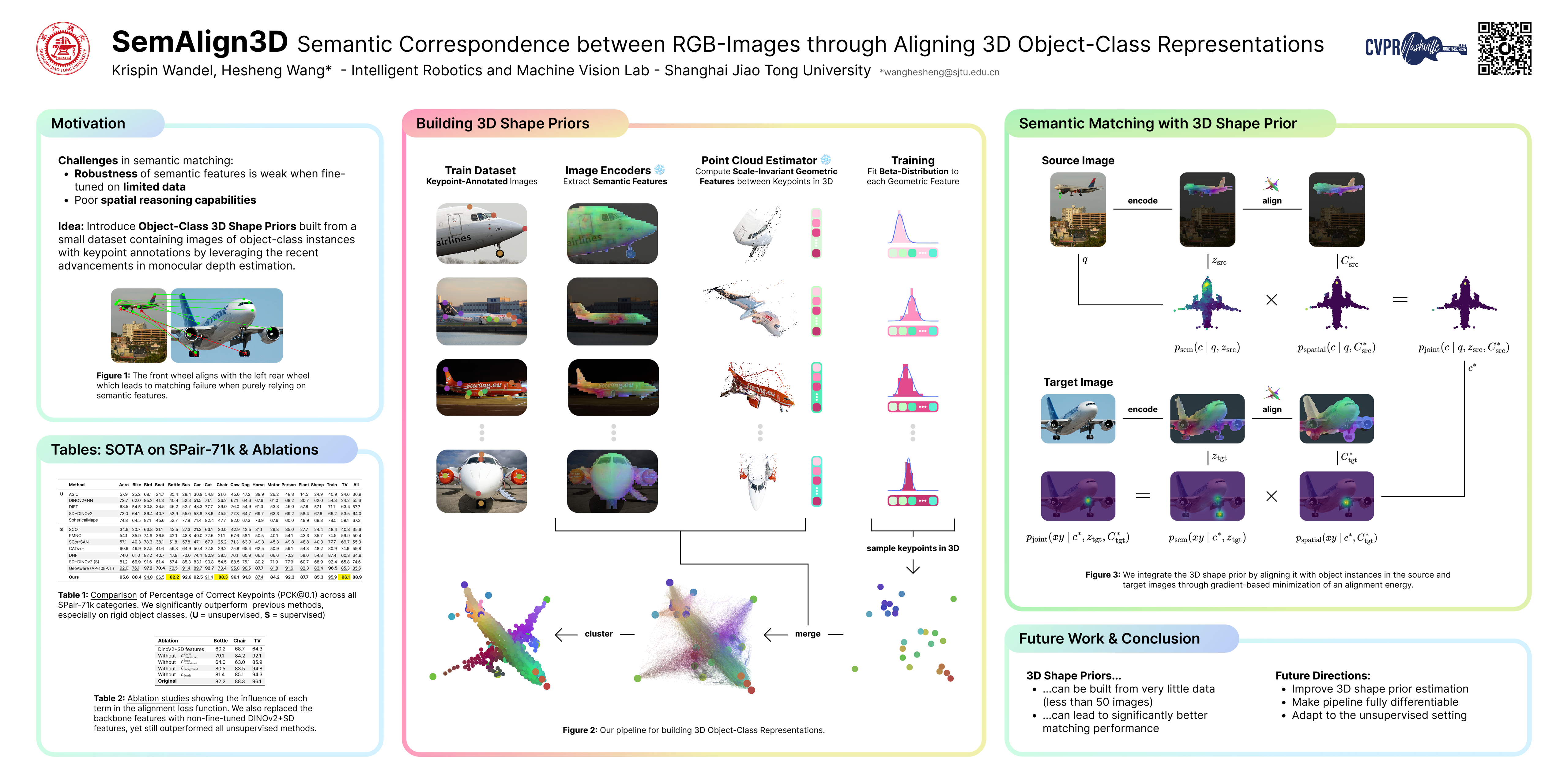
Semantic correspondence made tremendous progress through the recent advancements of large vision models (LVM). While these LVMs have been shown to reliably capture local semantics, the same can currently not be said for capturing global geometric relationships between semantic object regions. This problem leads to unreliable performance for semantic correspondence between images with extreme view variation. In this work, we aim to leverage monocular depth estimates to capture these geometric relationships for more robust and data-efficient semantic correspondence. First, we introduce a simple but effective method to build 3D object-class representations from monocular depth estimates and LVM features using a sparsely annotated image correspondence dataset. Second, we formulate an alignment energy that can be minimized using gradient descent to obtain an alignment between the 3D object-class representation and the object-class instance in the input RGB-image. Our method achieves state-of-the-art matching accuracy in multiple categories on the challenging SPair-71k dataset, increasing the PCK@0.1 score by more than 10 points on three categories and overall by 3.3 points from 85.6% to 88.9%.