EnliveningGS: Active Locomotion of 3DGS
{kind=link}
Abstract
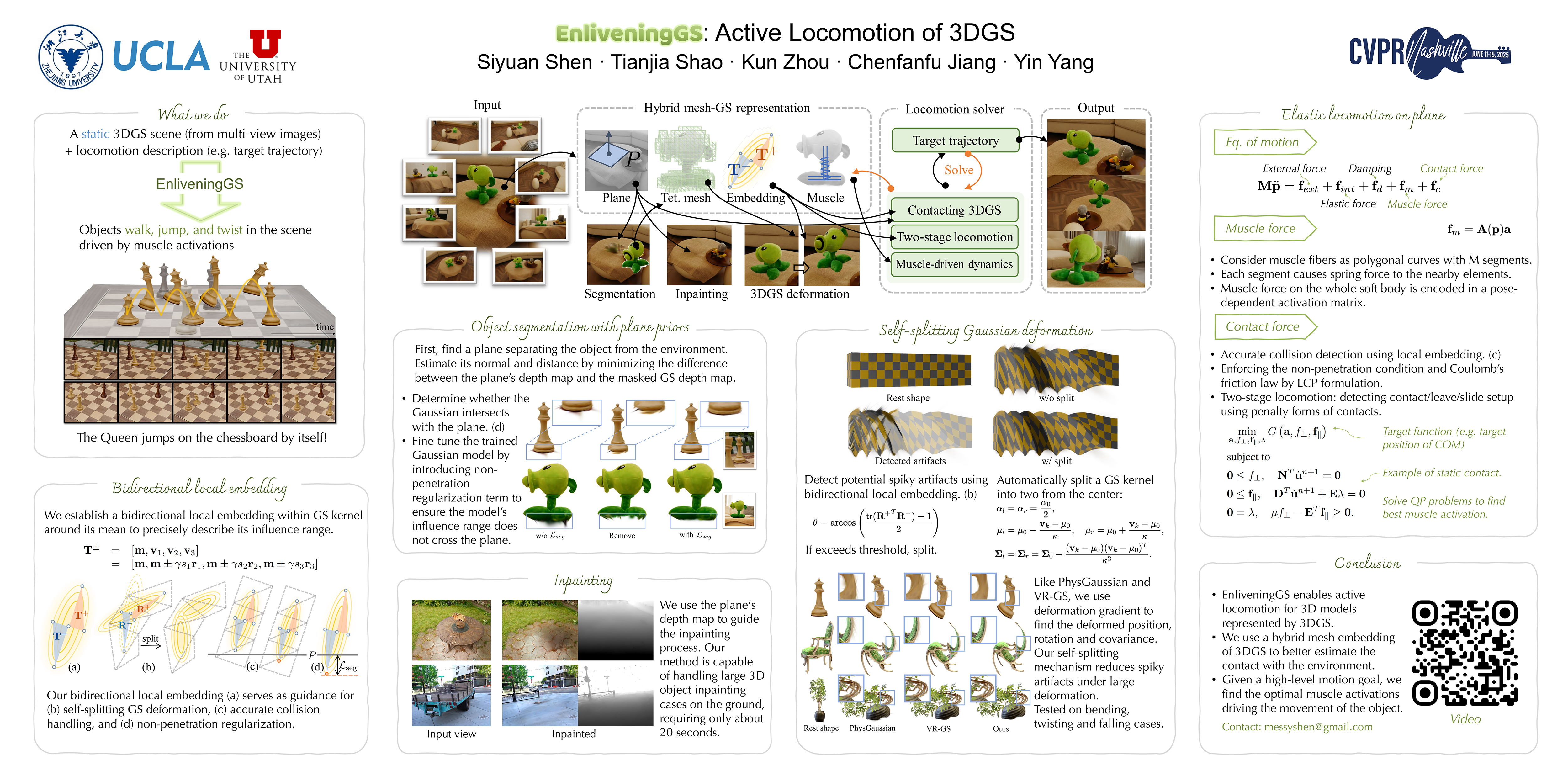
This paper presents a novel pipeline named EnliveningGS, which enables active locomotion of 3D models represented with 3D Gaussian splatting (3DGS). We are inspired by the fact that real-world lives pose their bodies in a natural and physically meaningful manner by compressing or elongating muscle fibers embedded in the body. EnliveningGS aims to replicate the similar functionality of 3DGS models so that the object within a 3DGS scene acts like a living creature rather than a static shape --- they walk, jump, and twist in the scene under provided motion trajectories driven by muscle activations. While the concept is straightforward, many challenging technical difficulties need to be taken care of. Synthesizing realistic locomotion of a 3DGS model embodies an inverse physics problem of very high dimensions. The core challenge is how to efficiently and robustly model frictional contacts between an ``enlivened model'' and the environment, as it is the composition of contact/collision/friction forces triggered by muscle activation that generates the final movement of the object. We propose a hybrid numerical method mixing LCP and penalty method to tackle this NP-hard problem robustly. Our pipeline also addresses the limitation of existing 3DGS deformation algorithms and inpainting the missing information when models move around.