RICCARDO: Radar Hit Prediction and Convolution for Camera-Radar 3D Object Detection
{kind=link}
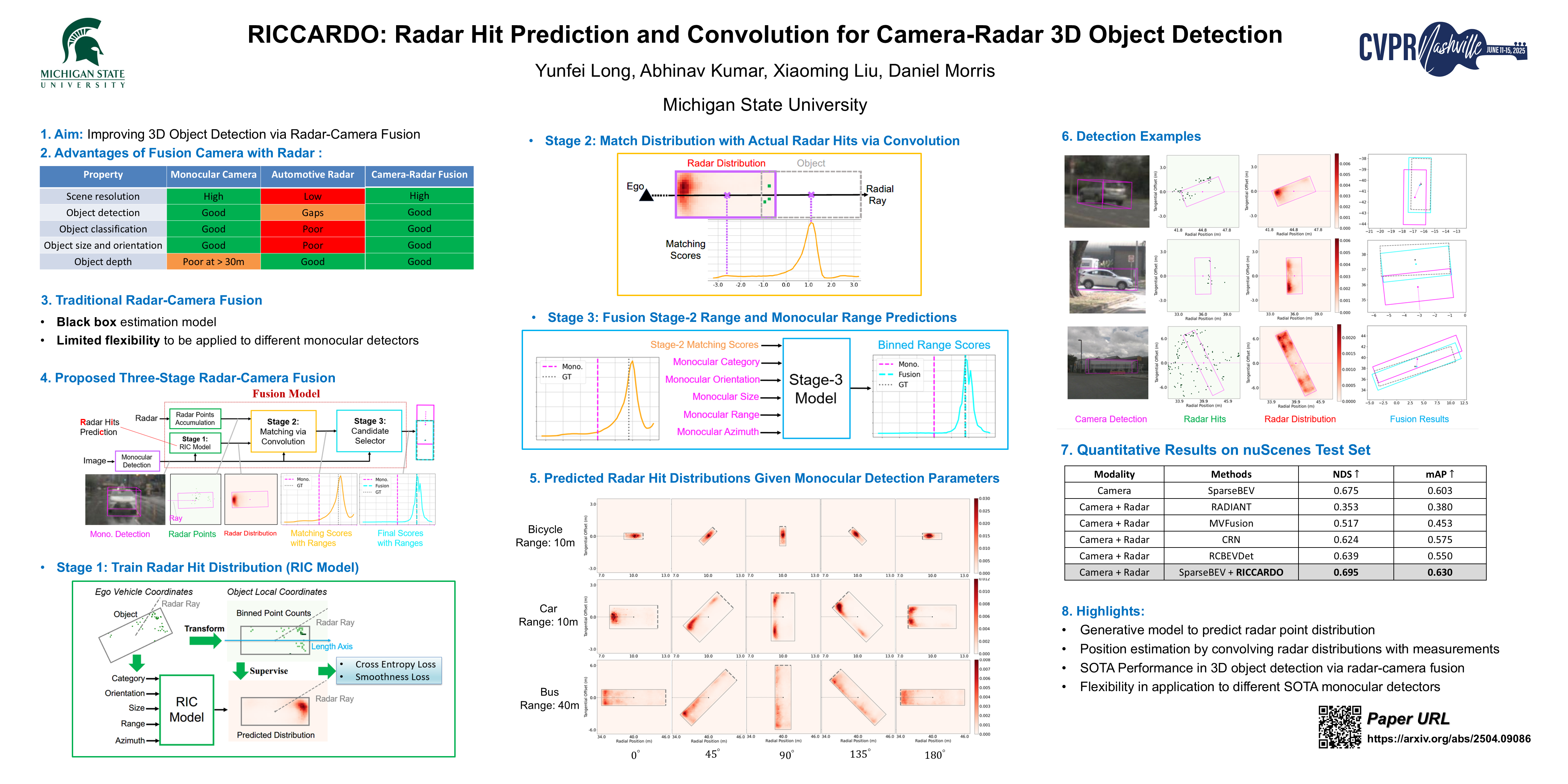
Abstract
Radar hits reflect from points on both the boundary and internal to object outlines. This results in a complex distribution of radar hits that depends on factors including object category, size and orientation. Current radar-camera fusion methods implicitly account for this with a black-box neural network. In this paper, we explicitly utilize a radar hit distribution model to assist fusion. First, we build a model to predict radar hit distributions conditioned on object properties obtained from a monocular detector. Second, we use the predicted distribution as a kernel to match actual measured radar points in the neighborhood of the monocular detections, generating matching scores at nearby positions. Finally, a fusion stage combines context with the kernel detector to refine the matching scores. Our method achieves the state-of-the-art radar-camera detection performance on nuScenes. We will release the model and code upon publication.