Camera Resection from Known Line Pencils and a Radially Distorted Scanline
{kind=link}
Abstract
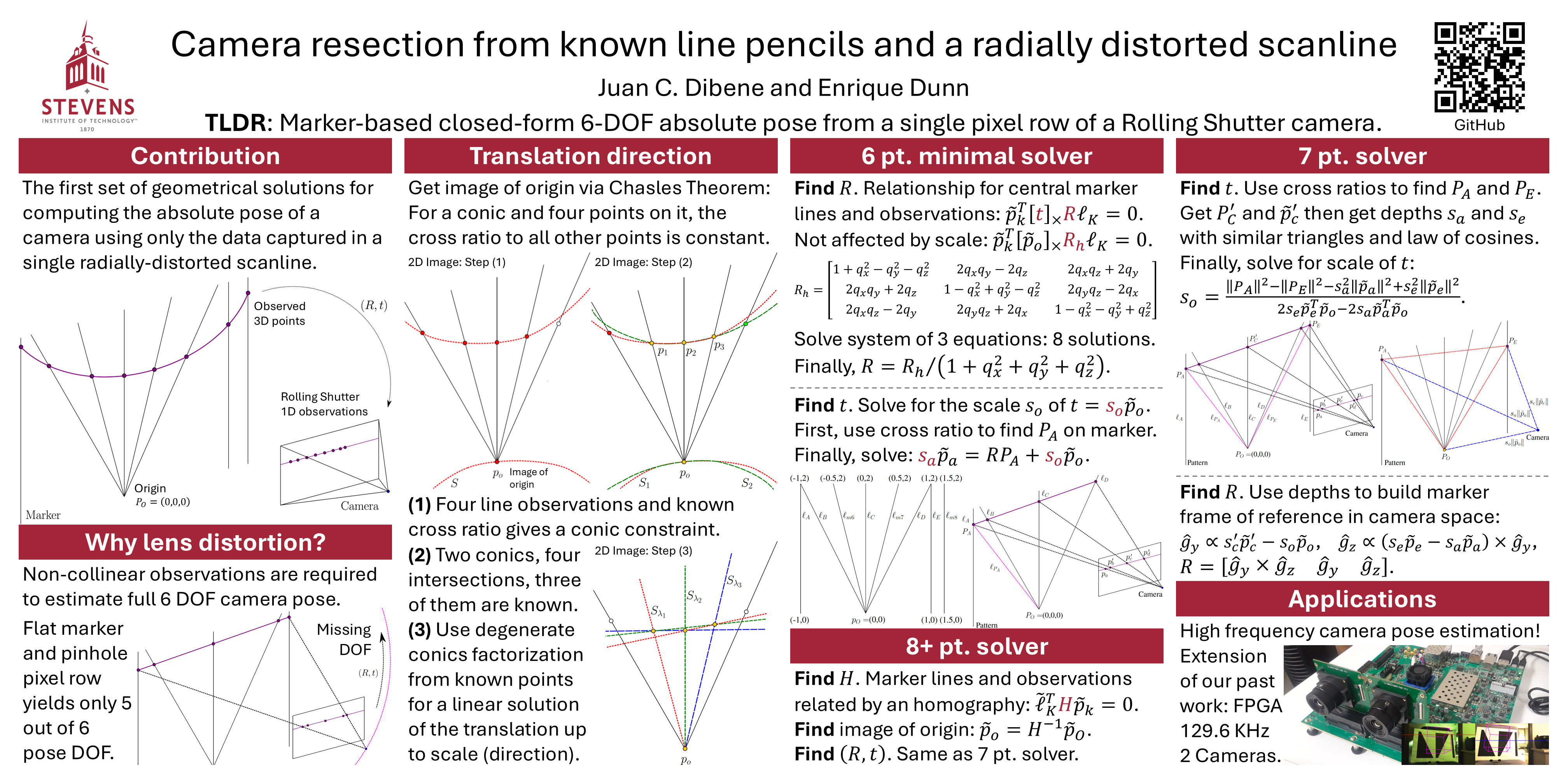
We present a marker-based geometric estimation framework for the absolute pose of a camera by analyzing the 1D observations in a single radially distorted pixel scanline.We leverage a pair of known co-planar pencils of lines, along with lens distortion parameters, to propose an ensemble of solvers exploring the space of estimation strategies applicable to our setup.First, we present a minimal algebraic solver requiring only six measurements and yielding eight solutions, which relies on the intersection of two conics defined by one of the pencils of lines.Then, we present a unique closed-form geometric solver from seven measurements.Finally, we present an homography-based formulation amenable to linear least-squares from eight or more measurements.Our geometric framework constitutes a theoretical analysis on the minimum geometric context necessary to solve in closed form for the absolute pose of a single camera from a single radially distorted scanline.