ChainHOI: Joint-based Kinematic Chain Modeling for Human-Object Interaction Generation
{kind=link}
Abstract
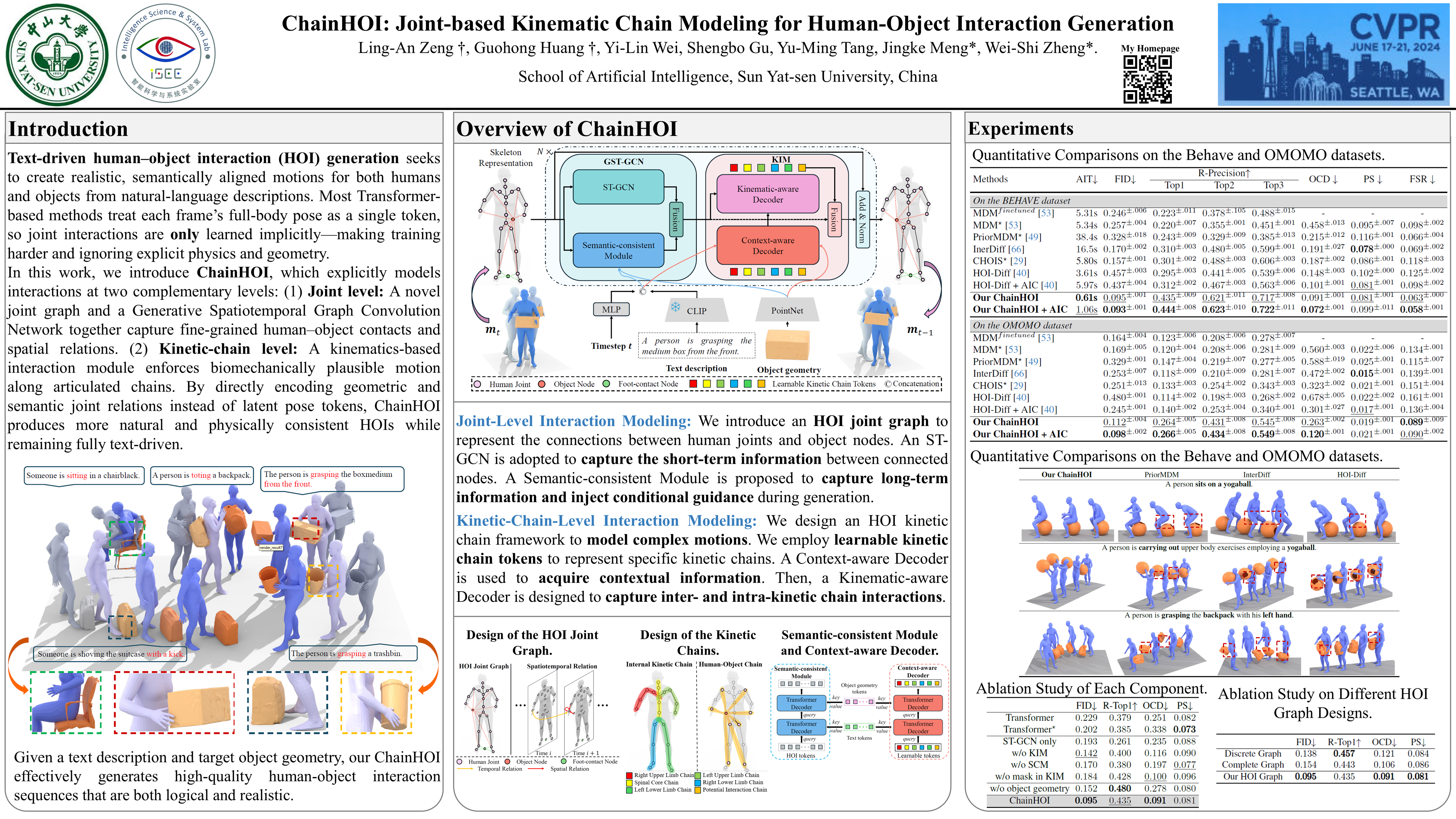
We propose ChainHOI, a novel approach for text-driven human-object interaction (HOI) generation that explicitly models interactions at both the joint and kinetic chain levels. Unlike existing methods that implicitly model interactions using full-body poses as tokens, we argue that explicitly modeling joint-level interactions is more natural and effective for generating realistic HOIs, as it directly captures the geometric and semantic relationships between joints, rather than modeling interactions in the latent pose space. To this end, ChainHOI introduces a novel joint graph to capture potential interactions with objects, and a Generative Spatiotemporal Graph Convolution Network to explicitly model interactions at the joint level. Furthermore, we propose a Kinematics-based Interaction Module that explicitly models interactions at the kinetic chain level, ensuring more realistic and biomechanically coherent motions. Evaluations on two public datasets demonstrate that ChainHOI significantly outperforms previous methods, generating more realistic, and semantically consistent HOIs.