MAGiC-SLAM: Multi-Agent Gaussian Globally Consistent SLAM
{kind=link}
Abstract
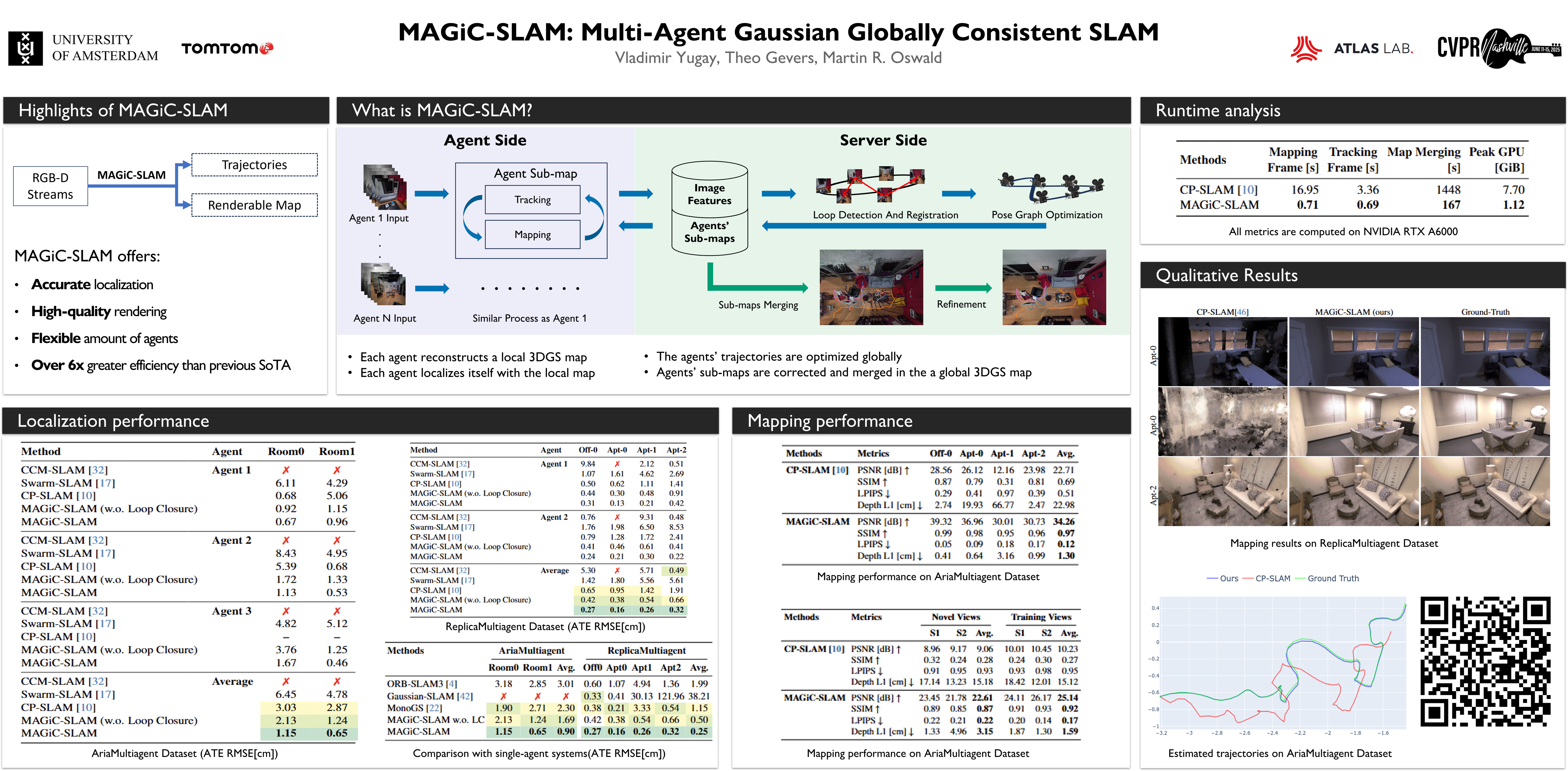
Simultaneous localization and mapping (SLAM) systems with novel view synthesis capabilities are widely used in computer vision, with applications in augmented reality, robotics, and autonomous driving. However, existing approaches are limited to single-agent operation. Recent work has addressed this problem using a distributed neural scene representation. Unfortunately, existing methods are slow, cannot accurately render real-world data, are restricted to two agents, and have limited tracking accuracy. In contrast, we propose a rigidly deformable 3D Gaussian-based scene representation that dramatically speeds up the system. However, improving tracking accuracy and reconstructing a globally consistent map from multiple agents remains challenging due to trajectory drift and discrepancies across agents' observations. Therefore, we propose new tracking and map-merging mechanisms and integrate loop closure in the Gaussian-based SLAM pipeline. We evaluate \ours on synthetic and real-world datasets and find it more accurate and faster than the state of the art.