OmniStereo: Real-time Omnidireactional Depth Estimation with Multiview Fisheye Cameras
Jiaxi Deng ⋅ Yushen Wang ⋅ Haitao Meng ⋅ Zuoxun Hou ⋅ Yi Chang ⋅ Gang Chen
2025 Poster
{kind=link}
Abstract
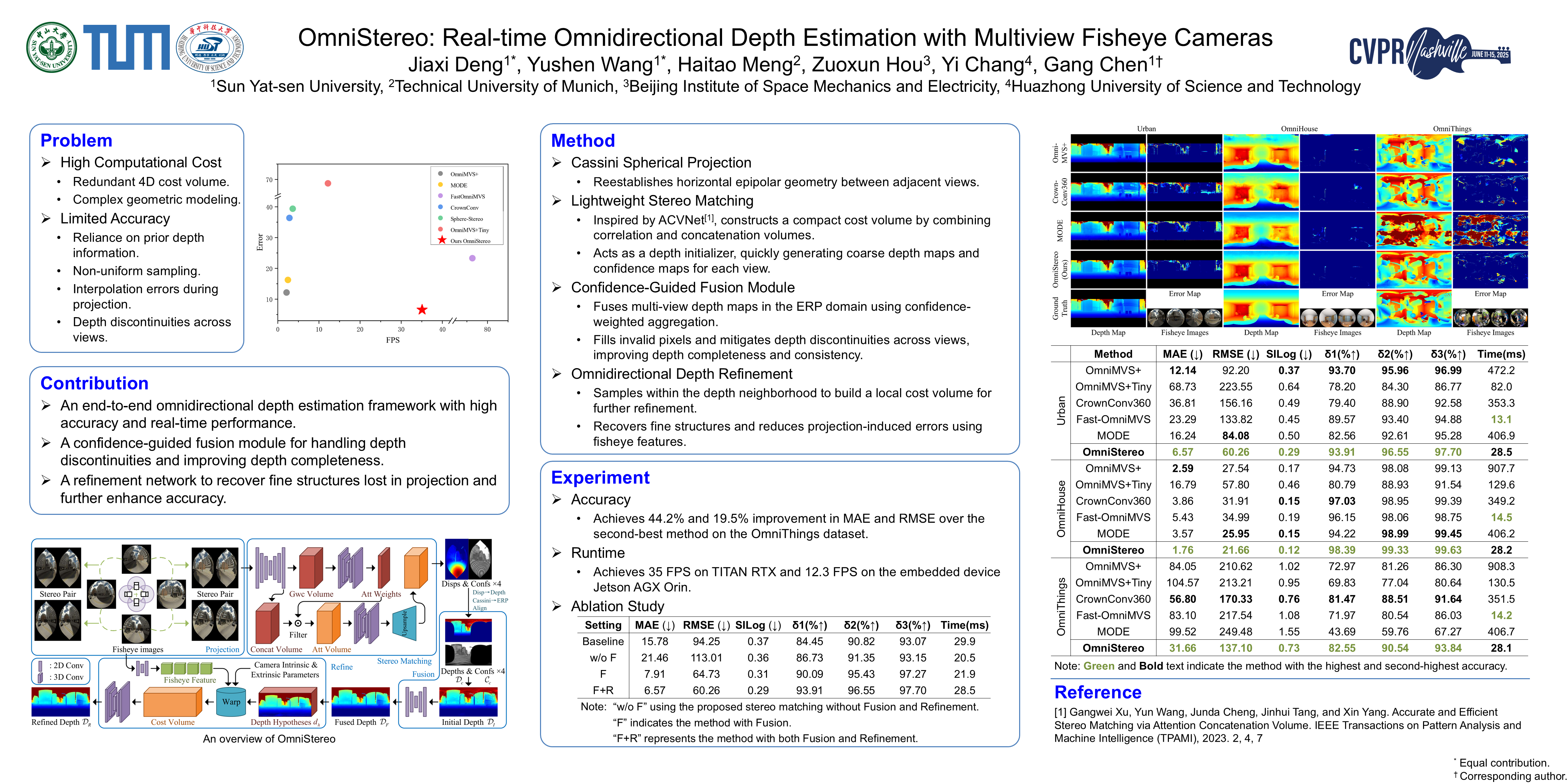
Fast and reliable omnidirectional 3D sensing is essential to many applications such as autonomous driving, robotics and drone navigation. While many well-recognized methods have been developed to produce high-quality omnidirectional 3D information, they are too slow for real-time computation, limiting their feasibility in practical applications. Motivated by these shortcomings, we propose an efficient omnidirectional depth sensing framework, called OmniStereo, which generates high-quality 3D information in real-time. Unlike prior works, OmniStereo employs Cassini projection to simplify the photometric matching and introduces a lightweight stereo matching network to minimize computational overhead. Additionally, OmniStereo proposes a novel fusion method to handle depth discontinuities and invalid pixels complemented by a refinement module to reduce mapping-introduced errors and recover fine details. As a result, OmniStereo achieves state-of-the-art (SOTA) accuracy, surpassing the second-best method over 32\% in MAE, while maintaining real-time efficiency. It operates more than 16.5$\times$ faster than the second-best method in accuracy on TITAN RTX, achieving 12.3 FPS on embedded device Jetson AGX Orin, underscoring its suitability for real-world deployment. The code will be open-sourced upon acceptance of the paper.
Chat is not available.
Successful Page Load