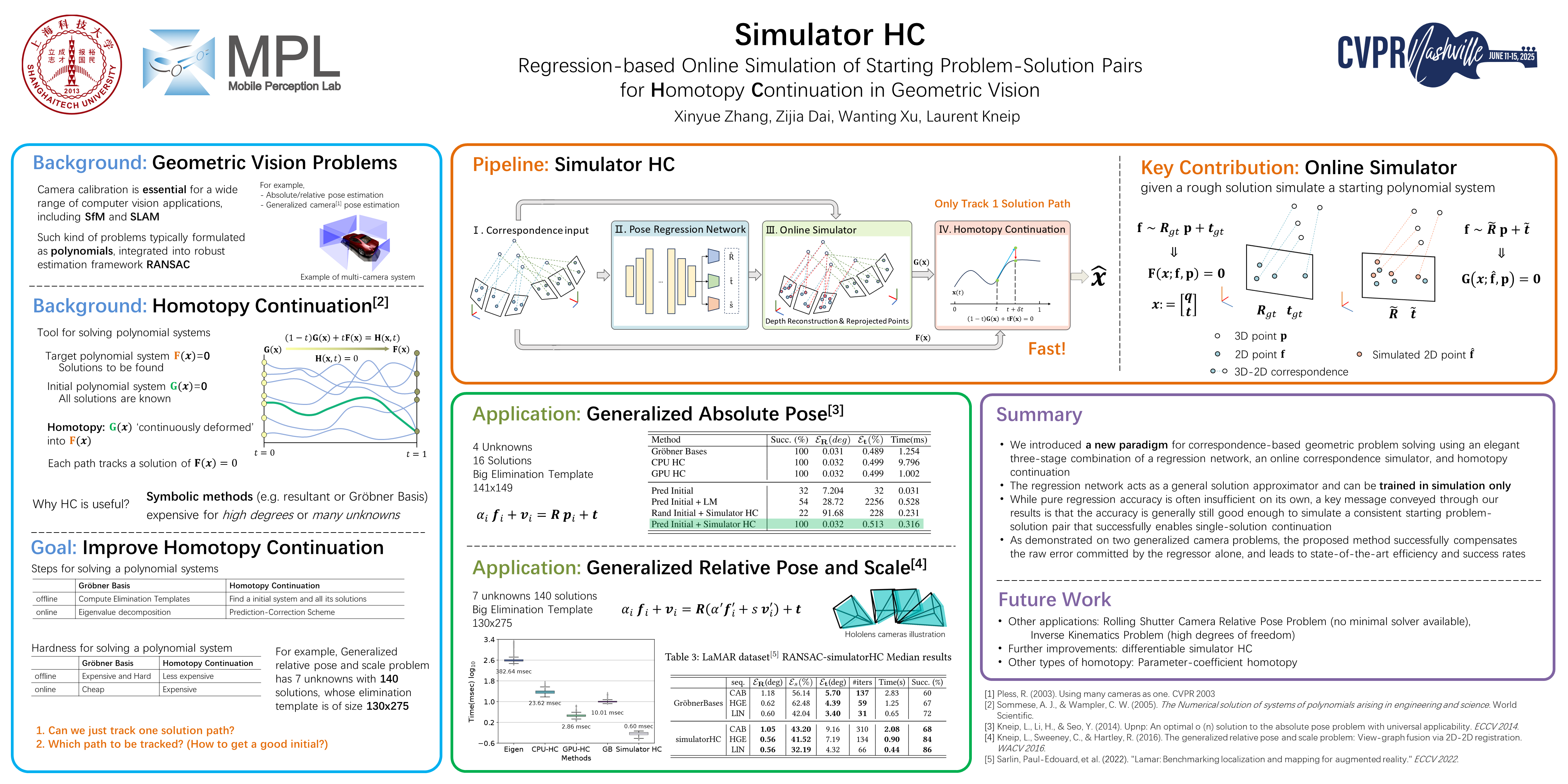
Simulator HC: Regression-based Online Simulation of Starting Problem-Solution Pairs for Homotopy Continuation in Geometric Vision
 Highlight
Highlight
{kind=link}
Abstract
While automatically generated polynomial elimination templates have sparked great progress in the field of 3D computer vision, there remain many problems for which the degree of the constraints or the number of unknowns leads to intractability. In recent years, homotopy continuation has been introduced as a plausible alternative. However, the method currently depends on expensive parallel tracking of all possible solutions in the complex domain, or a classification network for starting problem-solution pairs trained over a limited set of real-world examples. Our innovation lies in a novel approach to finding solution-problem pairs, where we only need to predict a rough initial solution, with the corresponding problem generated by an online simulator. Subsequently, homotopy continuation is applied to track that single solution back to the original problem. We apply this elegant combination to generalized camera resectioning, and also introduce a new solution to the challenging generalized relative pose and scale problem. As demonstrated, the proposed method successfully compensates the raw error committed by the regressor alone, and leads to state-of-the-art efficiency and success rates.